akulet
Newbie level 2
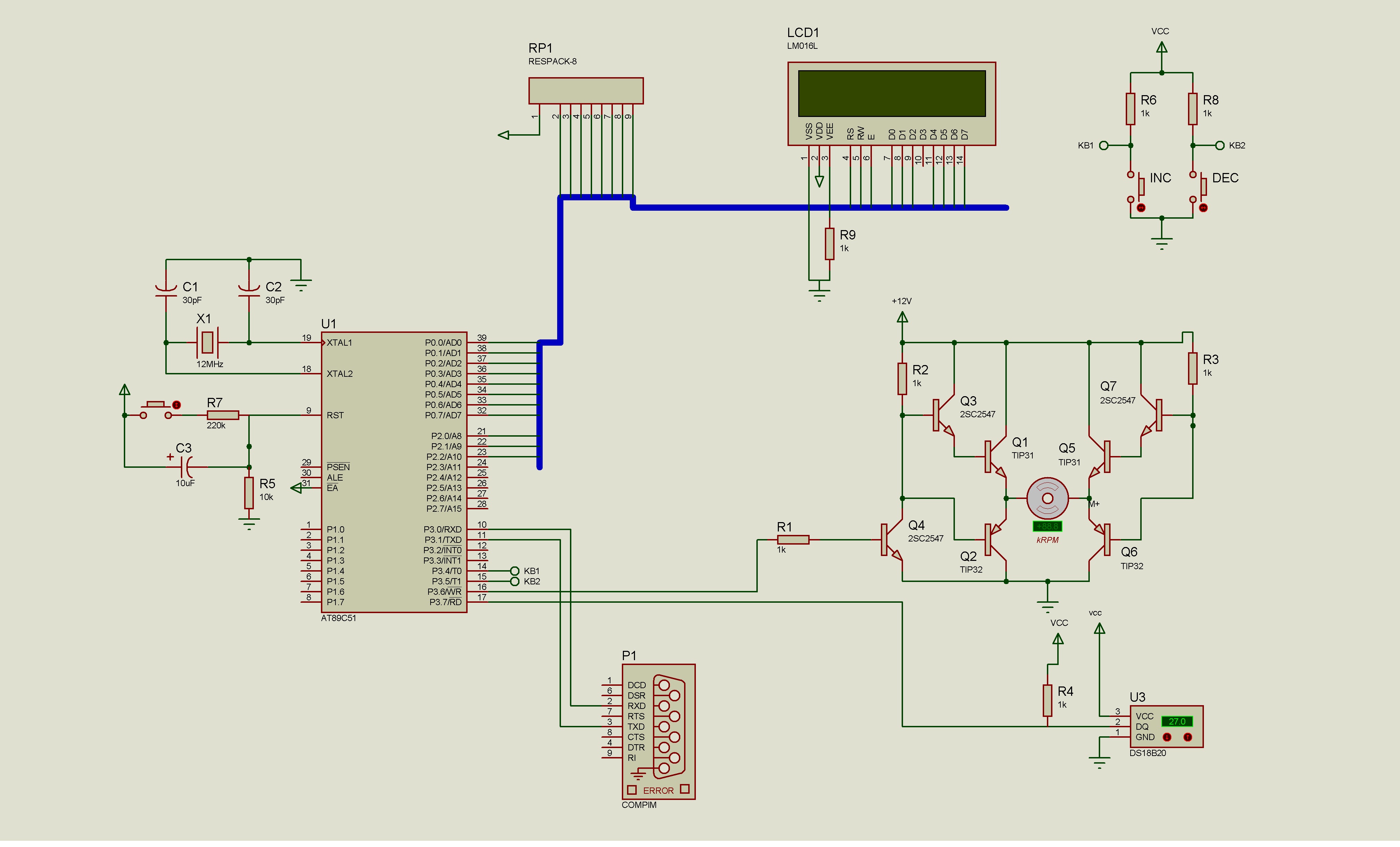
in this project am using the folowing components.
a. hardware
-micro controller AT89C51
-temperature sensor Ds18B20
-LCD display LM016L
-AN-DC motor
COMPIM serial connector
b.software components
-Proteus simulator
-Keil compiler
C-language
CONNECTION
compim serial connector to the micro controller in port p3.0 and p3.1
temperature to the micro controller through port p17
FAN-DC motor to the micro controller through port p16
LCD display to the micro controller through port p0
THE OPERATION
the user enters temperature value from the computer having an interface developed in V.B. then signal from the computer is sent into the micro controller by compim serial connector as the constant value.
then this constant value should be displayed on LCD and maintained constant.
now when a motor is rotating, temperature sensor should sense the effect caused by the rotation of the motor on the refrigerator. then the sensed temperature value by the sensor should be measured and these two values that is constant and measured one should be compared and if they are equal, the motor should be switched off and the buzzer is sounded.
this is tried code please friends help me edit code to fit my project
for the circuit design please click the like
a. hardware
-micro controller AT89C51
-temperature sensor Ds18B20
-LCD display LM016L
-AN-DC motor
COMPIM serial connector
b.software components
-Proteus simulator
-Keil compiler
C-language
CONNECTION
compim serial connector to the micro controller in port p3.0 and p3.1
temperature to the micro controller through port p17
FAN-DC motor to the micro controller through port p16
LCD display to the micro controller through port p0
THE OPERATION
the user enters temperature value from the computer having an interface developed in V.B. then signal from the computer is sent into the micro controller by compim serial connector as the constant value.
then this constant value should be displayed on LCD and maintained constant.
now when a motor is rotating, temperature sensor should sense the effect caused by the rotation of the motor on the refrigerator. then the sensed temperature value by the sensor should be measured and these two values that is constant and measured one should be compared and if they are equal, the motor should be switched off and the buzzer is sounded.
this is tried code please friends help me edit code to fit my project
Code C - [expand]
for the circuit design please click the like
Last edited by a moderator: