Vermes
Advanced Member level 4

- Joined
- Aug 2, 2011
- Messages
- 1,163
- Helped
- 0
- Reputation
- 0
- Reaction score
- 0
- Trophy points
- 1,316
- Activity points
- 22,318
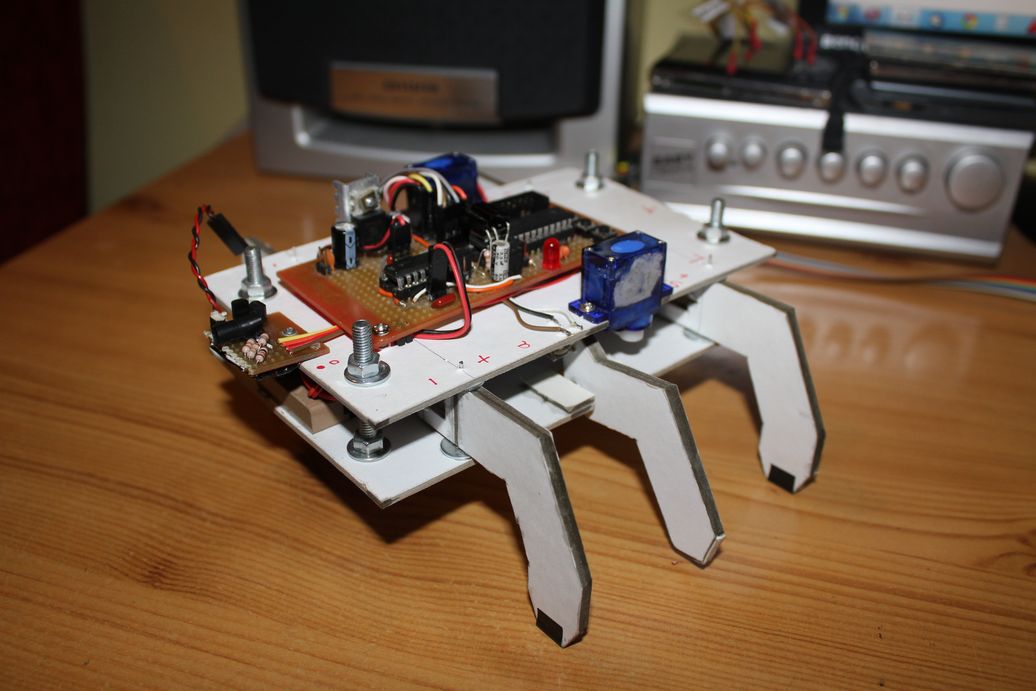
This walking robot is a hexapod in very simple version of such construction. There are only three servos in it.
Legs and platforms of the robot were drawn in Corel Draw. Mechanical elements due to their simplicity were not designed but just performed. The mechanism of central legs motion were simulated in program Working Model 2D. Electronics of the robot consists of education board that can be home made. The program was written in Bascom.
The robot was made of cardboard. It is 2mm thick and consists of notebooks covers. This material is very easily processed and after flooding with glue – very durable and rigid.
The legs were made of two layers glued together, what provides great rigidity and thus stability of the robot.
The main element of the robot is PCB with voltage stabilizer TS7805, microcontroller Atmega8 clocked by an external crystal quartz 12MHz, H bridge L293D and some connectors.
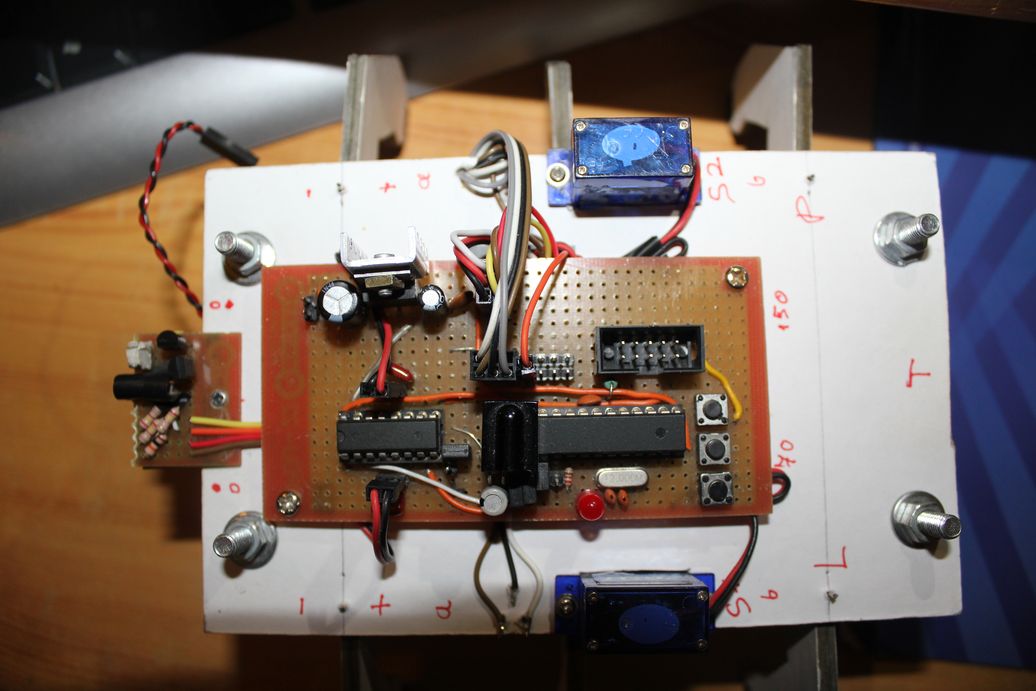
It is powered by two Li-Ion accumulators connected in series. It can move its legs by using two processed servos. Positions of legs are read by potentiometers and ADC converter.
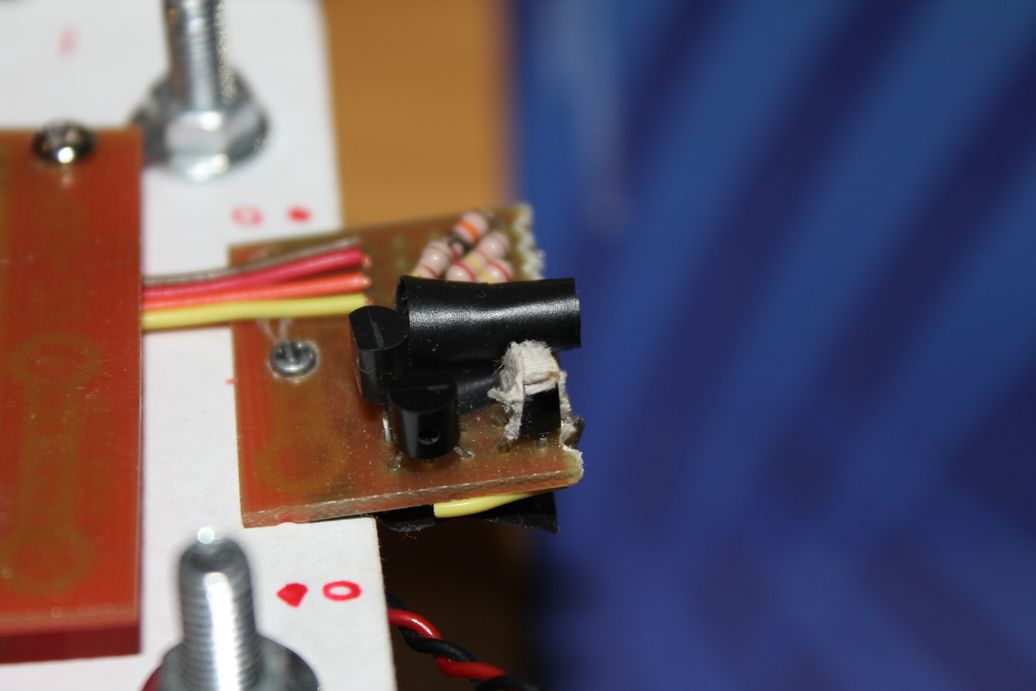
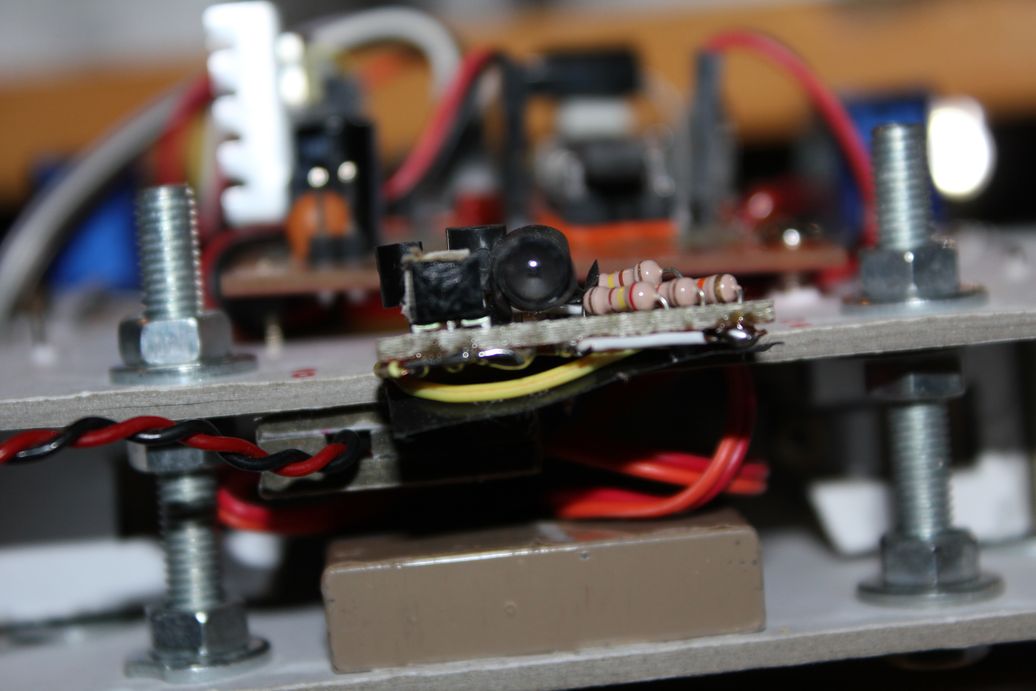
The robot was equipped with one sensor of own construction. Its range is up to 30 cm, depending on the color and surface of the object.
Video of operation:
Link to original thread - Robot kroczący "Kardbarder" - hexapod