HighTechPower
Member level 5
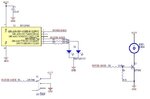
Hi. I'm using PIC12F683 in a circuit. I'm using it's pin 4, MCLR as digital input by adjusting the configuration bits accordingly. I have connected a SPDT switch to pin 4 whose level can be either 3.3 V or 0 V, however whenever there is a change in input voltage level at pin 4 (low to high or high to low) by changing switch position, it resets pin 7 (perhaps the whole device). Any idea why this is happening and how to avoid that.