imranahmed
Advanced Member level 3

- Joined
- Dec 4, 2011
- Messages
- 822
- Helped
- 3
- Reputation
- 6
- Reaction score
- 3
- Trophy points
- 1,298
- Location
- Karachi,Pakistan
- Activity points
- 6,533
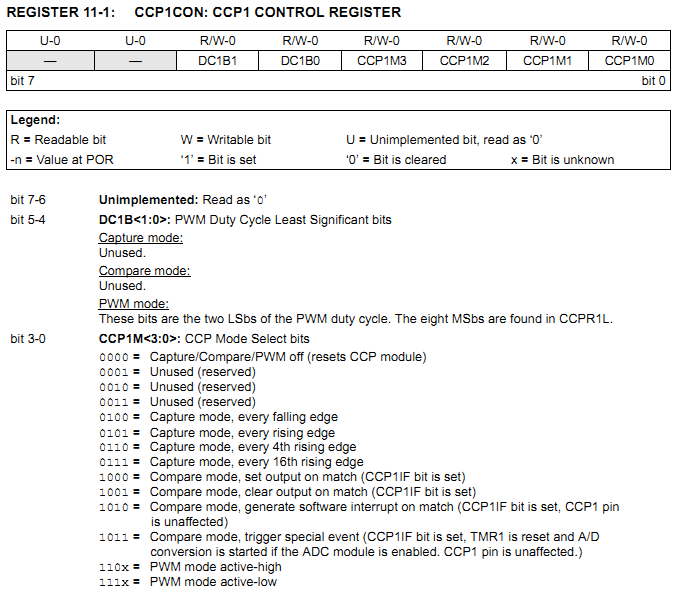
Please let me know that about the CCP (Capture,Compare and PWM).
My question is that what and which condition we use Capture or Compare or (PWM slightly know).
And what thing the CCP register Capture or Compare or (PWM slightly know).
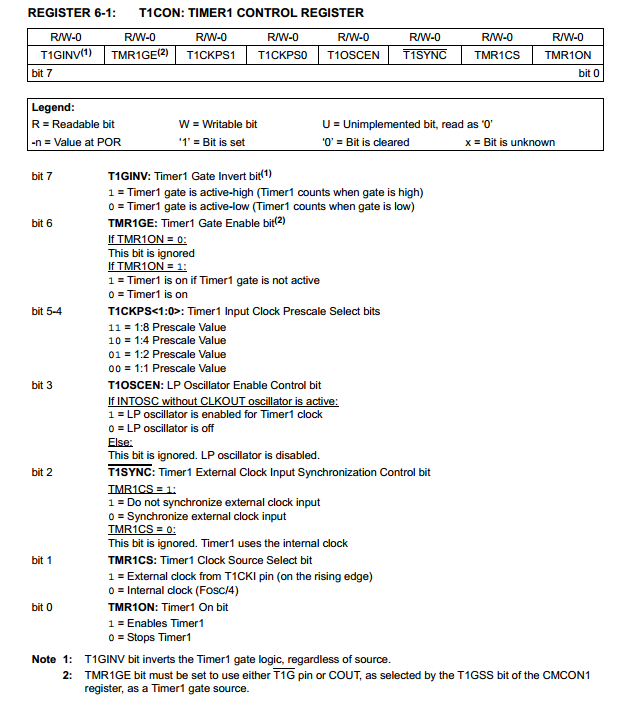
What is prescaler and postscaler?
My question is that what and which condition we use Capture or Compare or (PWM slightly know).
And what thing the CCP register Capture or Compare or (PWM slightly know).
What is prescaler and postscaler?
Last edited: