Vermes
Advanced Member level 4

This device is a robot based on analogue electronics. It works on 8 electronic elements. Advantages are quite good speed and stability.
Body
It was made of thick carton from an old binder. It's the main construction material because of its features: it's hard, the processing is easy to make and it's extremely available. The nut on the engines is thrust, which is necessary at this drive. In the front instead of free wheel, pins with plastic heads were applied – because of their good slip.
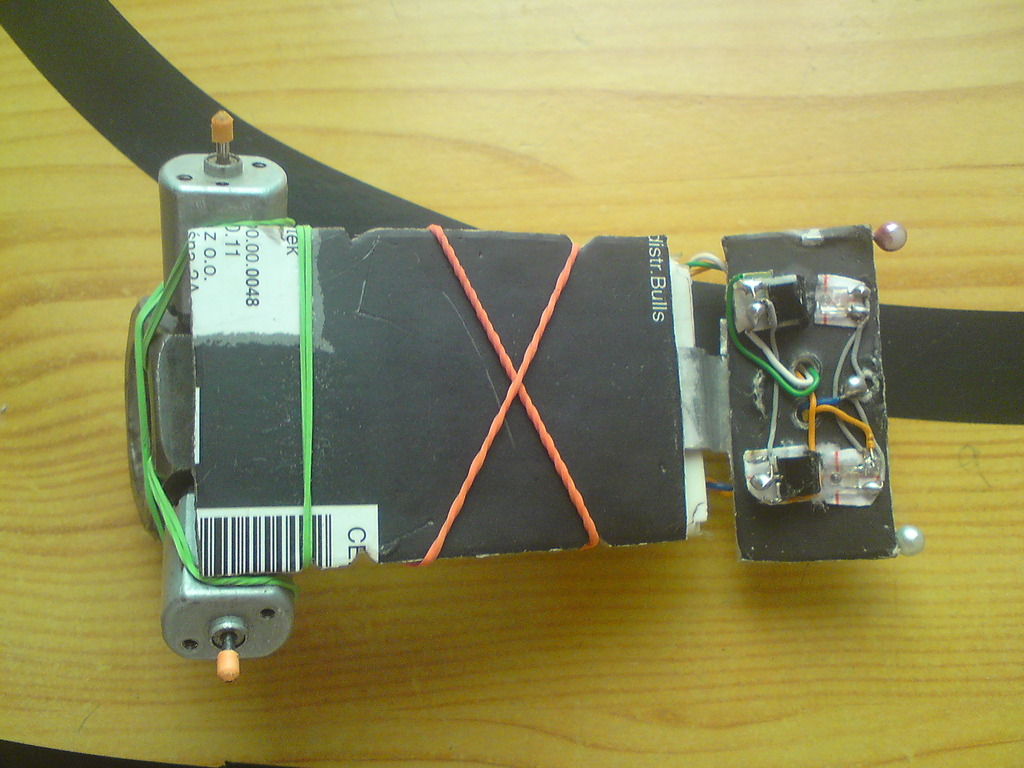
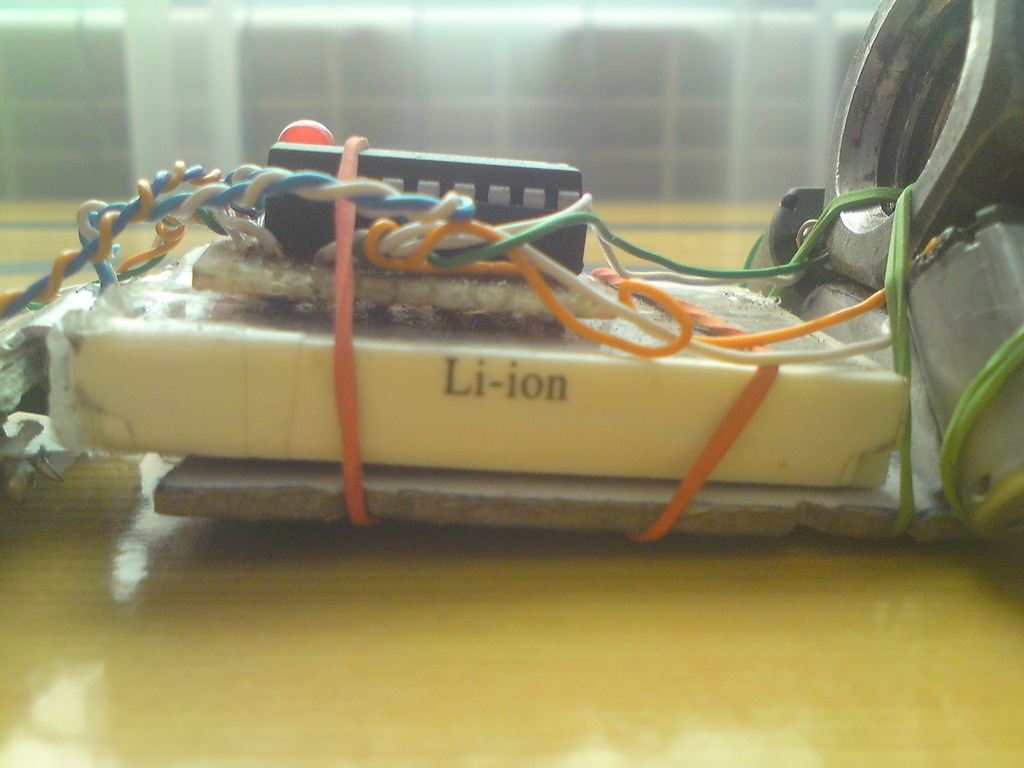
Power supply
A lithium-ion battery from an old mobile phone. Theoretically it should give 3,7V, practically with fully charge it's 4V. The capacity is 1300mAh, the actual capacity isn't easy to measure.
Drive
Two little engines from old discmen were used -they shifted heads with lasers. It's hard to define the rotates, but they're rather low, axes rotate with quite big power.
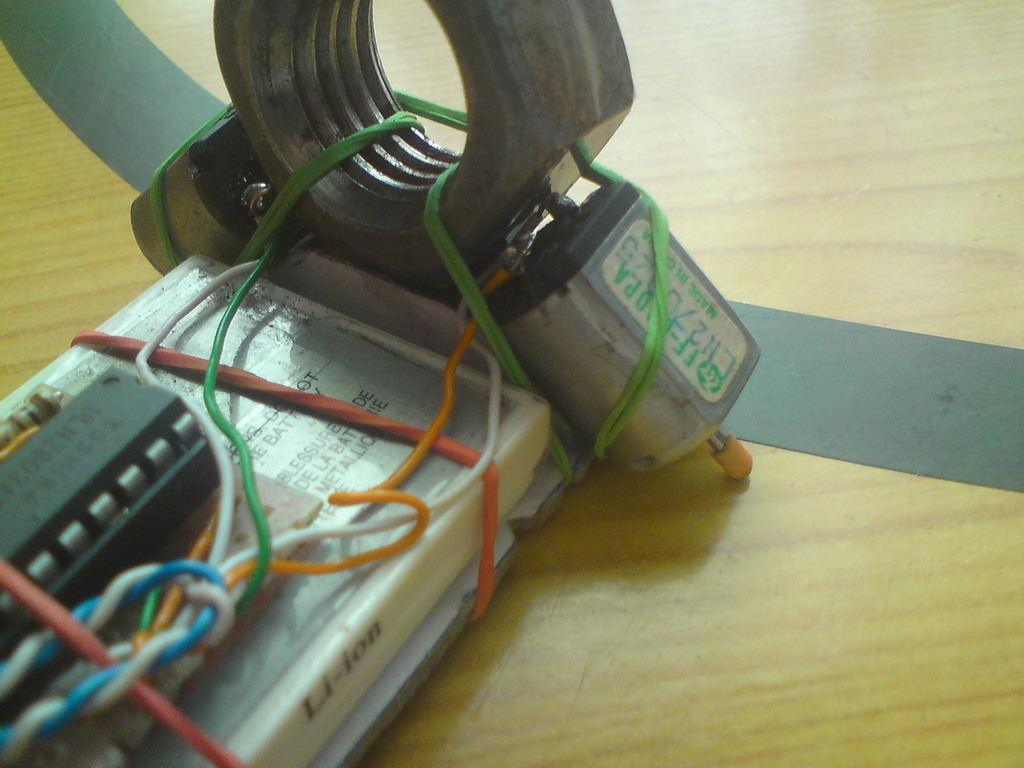
Additionally, some kind of 'tires' were set up on the shafts. They are elements of soft isolation from a cable. They enlarge adhesion and speed, but, unfortunately, they have negative effect on stability of motion.

Electronics
There are two sensor in space of 25mm, made of phototransistors from a mouse ball, from which also diodes Ir linked parallel and limited by resistor of 100Ω.
Phototransistors were directly connected to the power supply from one side. From the other side they were connected to the ULN2803 driver. It's maximum charge is 500mA for a channel.
The motor takes about 100mA during the motion, so ULN doesn't heat up. ULN was used only because the lack of transistors.
Without tires:
With tires:
Link to original thread – BEAM: Mały linefollower