jmx66
Member level 5
Hi all,
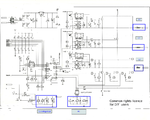
Found this brushless dc card and I only want to know use of :
- L1
- L2
- L3
I think it's related about EMI , but is there a " rule of thumb " , in order to give right values for a 1500 W , 6 step brushless dc motor?
Identical query about blue rectangle RC ?
Any links to understand these two circuits?
Thanks a lot.
jm
Found this brushless dc card and I only want to know use of :
- L1
- L2
- L3
I think it's related about EMI , but is there a " rule of thumb " , in order to give right values for a 1500 W , 6 step brushless dc motor?
Identical query about blue rectangle RC ?
Any links to understand these two circuits?
Thanks a lot.
jm