adalah
Newbie level 6
hexapod walker
Hi gang..
i'm new here.
nice to meet u all..
actually,
i need some advise from other about my project.
as i mention,
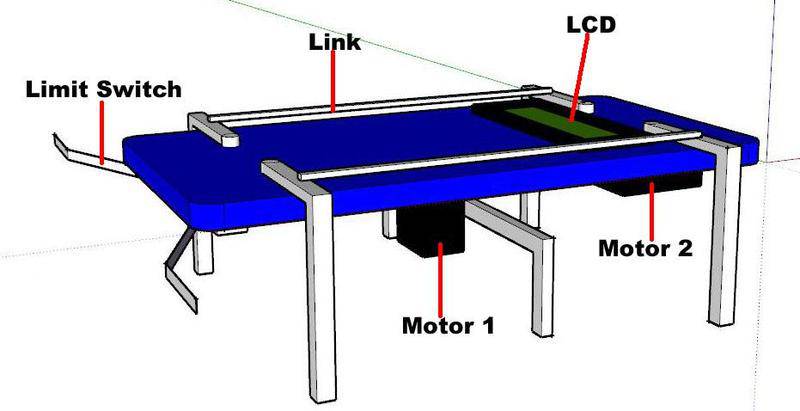
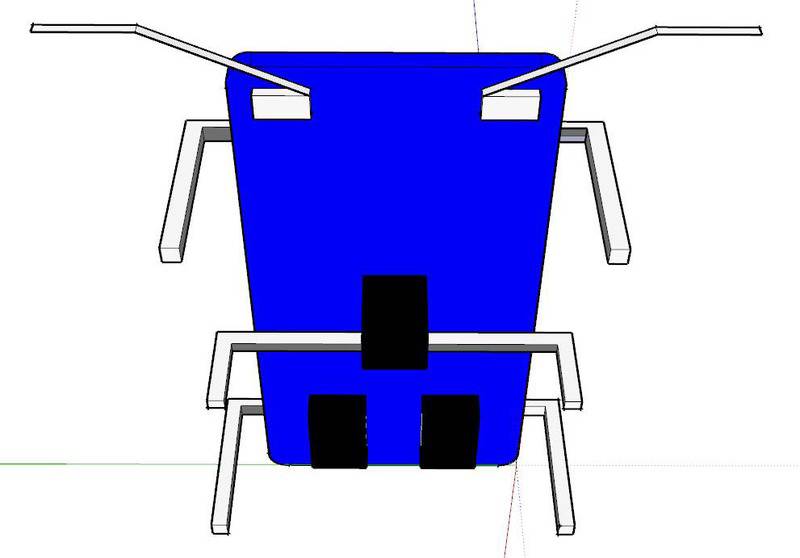
my project is about hexapod walker.
this robot using 3 servo motor & PIC16F877A with 20MHz.
my problems is to create the signal for this servo motor.
each servomotor have 3 positions which are -90,0.90 degree.
i'm using mikroc to make the programming.
i really need anyone help to solve my prob.
here,
i post my image for the hexapod walker.
Hi gang..
i'm new here.
nice to meet u all..
actually,
i need some advise from other about my project.
as i mention,
my project is about hexapod walker.
this robot using 3 servo motor & PIC16F877A with 20MHz.
my problems is to create the signal for this servo motor.
each servomotor have 3 positions which are -90,0.90 degree.
i'm using mikroc to make the programming.
i really need anyone help to solve my prob.
here,
i post my image for the hexapod walker.