Daljeet12
Member level 4
I have come across the Wikipedia page which explains the theoretical terms but I am having trouble understanding its real example.
 en.m.wikipedia.org
en.m.wikipedia.org
I just assume some task are (e.g. LED ON, LED OFF, read a button, display a message on an LCD screen, Motor ON, Motor OFF, read temperature data, send serial data to PC, receive data from PC )
I am showing some example of running task
CPU sending instructions to turn on the LED.
CPU sending instructions to turn off the LED
CPU sending instructions to turn on the Motor.
CPU sending instructions to turn off the Motor.
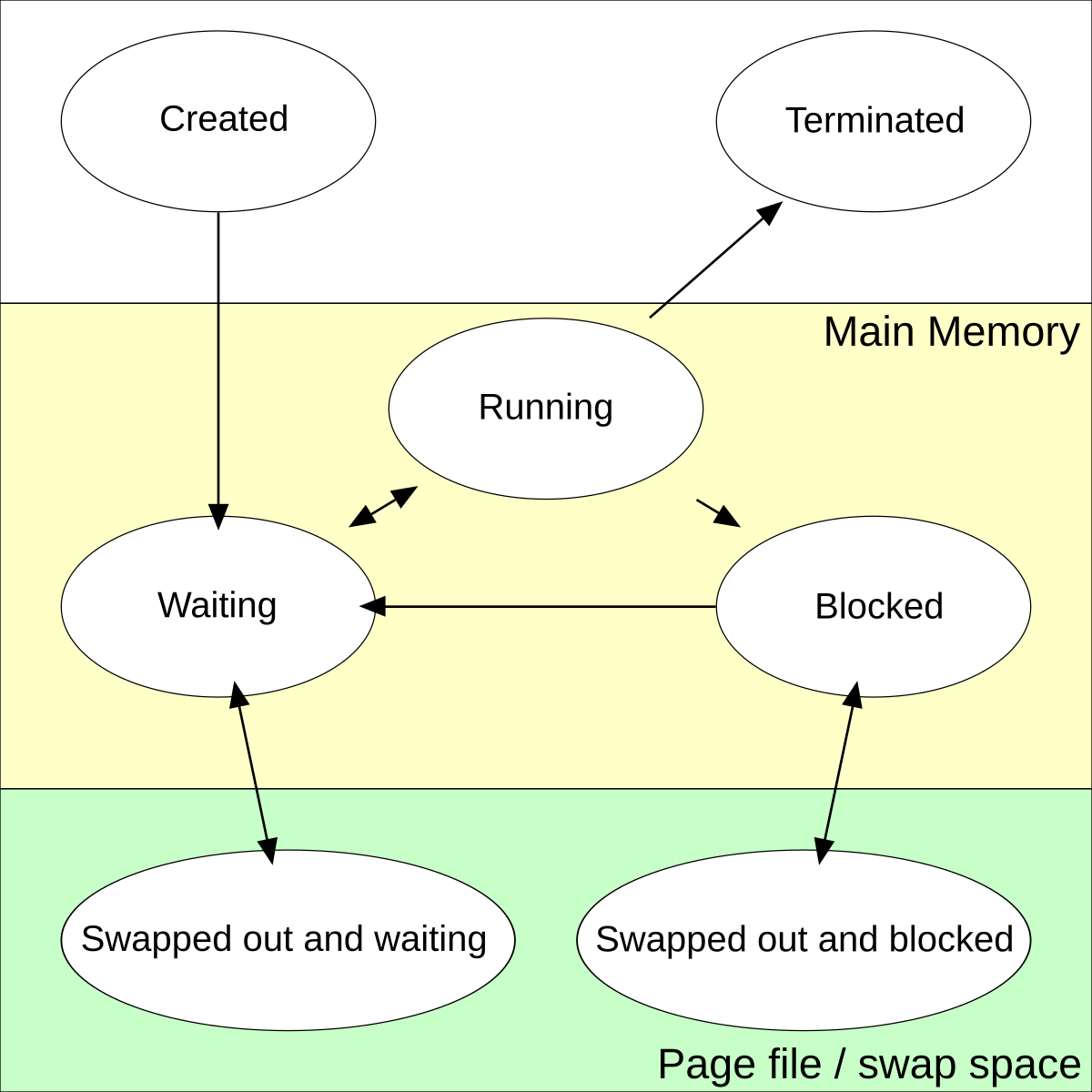
Explaining ready to run, running, and suspend state of task
If ADC data arrives in every 100us. CPU only takes 10us to receive ADC data. Now CPU has 90us of free time and we can use it to do any other task. We can use 90us CPU time to complete other tasks.
Does it mean that the ADC task will run on the CPU for 10us and it will be suspended for 90us? It means It should be ready to run every 100us. Because if the CPU is not assigned after 100us then the incoming data will be lost.
I can explain more but i want to confirm that what i explained in scheduling is correct.
Process state - Wikipedia
I just assume some task are (e.g. LED ON, LED OFF, read a button, display a message on an LCD screen, Motor ON, Motor OFF, read temperature data, send serial data to PC, receive data from PC )
I am showing some example of running task
CPU sending instructions to turn on the LED.
CPU sending instructions to turn off the LED
CPU sending instructions to turn on the Motor.
CPU sending instructions to turn off the Motor.
Explaining ready to run, running, and suspend state of task
If ADC data arrives in every 100us. CPU only takes 10us to receive ADC data. Now CPU has 90us of free time and we can use it to do any other task. We can use 90us CPU time to complete other tasks.
Does it mean that the ADC task will run on the CPU for 10us and it will be suspended for 90us? It means It should be ready to run every 100us. Because if the CPU is not assigned after 100us then the incoming data will be lost.
I can explain more but i want to confirm that what i explained in scheduling is correct.