Welcome to our site! EDAboard.com is an international Electronics Discussion Forum focused on EDA software, circuits, schematics, books, theory, papers, asic, pld, 8051, DSP, Network, RF, Analog Design, PCB, Service Manuals... and a whole lot more! To participate you need to register. Registration is free. Click here to register now.
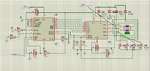
i want to drive the stepper motor for my robotic arm project..plz guide me with the controlling circuitry..i have attached the schematic..will it work??..also tell me what type of motor is suitable..unipolar or bipolar??..i m new to this..help..
It is depends upon the load that you want to drive and weight of motor .....generally for robot arm kind of application.... SM15 of FDK will be good choice ....also unipolar stepper motor is commonly avaliable .....and control can be made bi-direction very easily in case of unipolar stepper motor by alterning the sequence of excitation...
I will post the code for PIC18f2550....I am not using atmega16 even I don't have tool chain for that too.....you need to modify the configuration of that accordingly
This will give you idea how to work with stepper motor.....
plzz tell me will the driver which i have attached work??..will it work without interfacing??..i m attaching the proteus simulation..but its not working..help me with this..whats the mistake??..help..
no this is a code that i made for stepper motor with transistor based switches.....you can only take the hints from it....I am not sure that this will work with the IC that you said... need to do some study of your stepper motor driver...
This site uses cookies to help personalise content, tailor your experience and to keep you logged in if you register.
By continuing to use this site, you are consenting to our use of cookies.