AdvaRes
Advanced Member level 4

- Joined
- Feb 14, 2008
- Messages
- 1,163
- Helped
- 113
- Reputation
- 220
- Reaction score
- 51
- Trophy points
- 1,328
- Location
- At home
- Activity points
- 7,442
Hi all,
I need materials and advices to design a control system for a one direction rotating belt. The goal of this system is to sustain an object in an unstable equilibrium position. The problem resembles a lot to Inverted pendulum or the Self-balancing unicycle
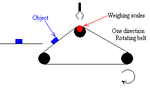
The system is shown in the figure. Its is composed of two rotating belts among which one is planar and rotates continuously without interruption while the second has a slope of about 40 degree. This belt receives periodically objects from the first one and tends to transport them to the top point of the belt such that a robot arm can catch them. Objects are solids with different weights. A scale (see figure) is used as a sensor to detect if the object reached or not the top point of the belt.
The belt rotates in one direction to bring the object to the desired direction.
When the object is exactly in the top the scale indicated a maximum of weight forcing the belt to stop.
I find the control system difficult to implement since one direction control is involved and because the weight measured by the scale will have a bell shape which maximum has to be determines in real time.
Please refer me to the appropriate materials.
Thanks in advance.
I need materials and advices to design a control system for a one direction rotating belt. The goal of this system is to sustain an object in an unstable equilibrium position. The problem resembles a lot to Inverted pendulum or the Self-balancing unicycle
The system is shown in the figure. Its is composed of two rotating belts among which one is planar and rotates continuously without interruption while the second has a slope of about 40 degree. This belt receives periodically objects from the first one and tends to transport them to the top point of the belt such that a robot arm can catch them. Objects are solids with different weights. A scale (see figure) is used as a sensor to detect if the object reached or not the top point of the belt.
The belt rotates in one direction to bring the object to the desired direction.
When the object is exactly in the top the scale indicated a maximum of weight forcing the belt to stop.
I find the control system difficult to implement since one direction control is involved and because the weight measured by the scale will have a bell shape which maximum has to be determines in real time.
Please refer me to the appropriate materials.
Thanks in advance.