powersys
Advanced Member level 1
Kindly refer to the schematic of a control strategy in Figure 1, which is modified from an example provided by MATHWORKS MATLAB/SIMULINK.
The block diagram insides the permanent magnet synchronous machine (PMSM) block is shown in Figure 2.
There are two main blocks, namely (i) electrical model, (ii) mechanical model.
I find out there is a discrete-time integrator (see Figure 3) in the electrical model and mechanical model.
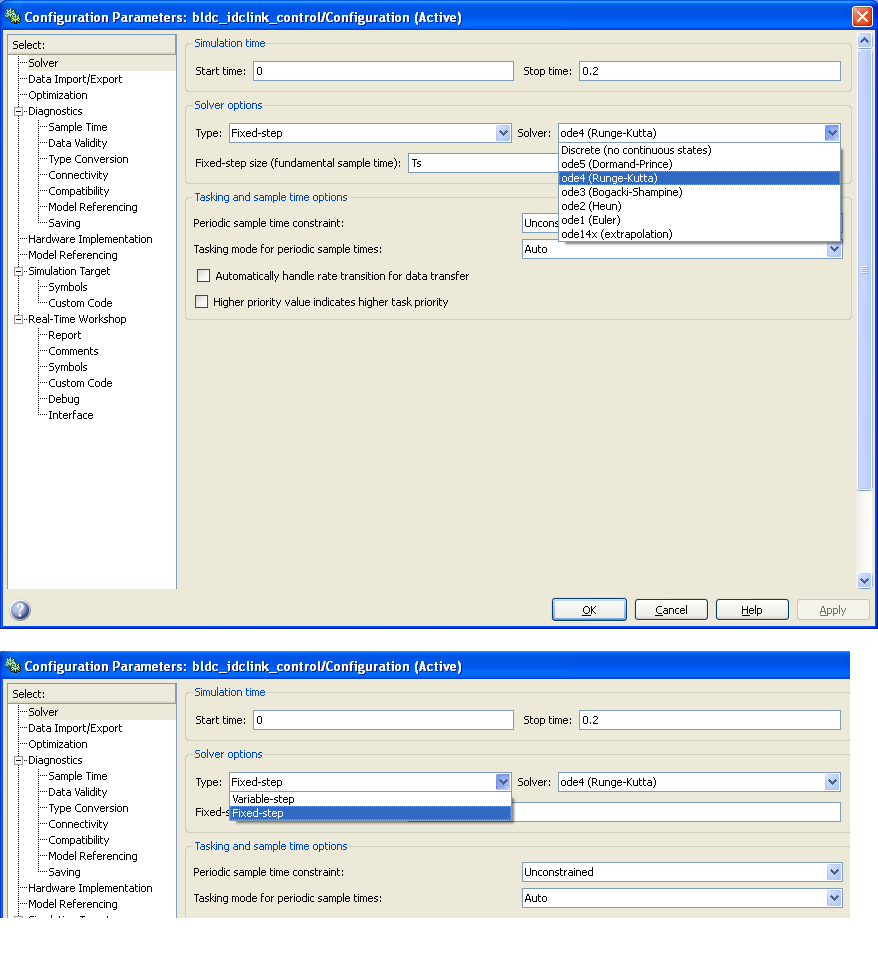
The simulation configurations are given in Figure 4, i.e. Solver Type: Fixed-step, Solver: ODE4.
Questions:
[1] May I know why "discrete-time integrator" is used in PMSM instead of "continuous-time integrator" (1/s)? If I'm not mistaken, in real world, the states in PMSM is continuous.
[2] In my opinion, in practice, all the states in PMSM are in continuous-time domain, whilst all the states in digital controller are in discrete-time domain. If I wish to model the PMSM using continous-time components (e.g. 1/s), and the digital controller with discrete-time components (e.g. the discrete-time integrator), which solver type that I should use? Fixed- or Variable-step? Discrete (no continuous states) or others?
Kindly advise.
Thank you very much.
Figure 1.
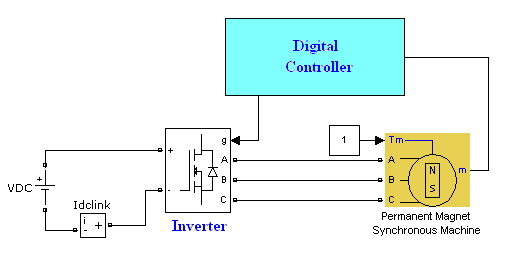
Figure 2.
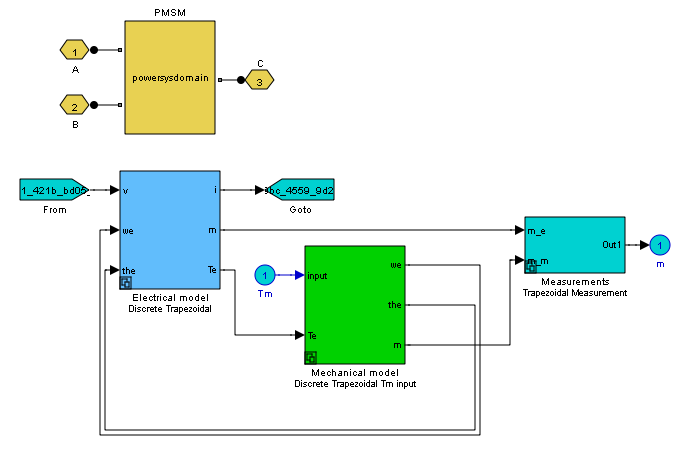
Figure 3.
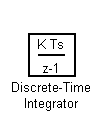
Figure 4.
The block diagram insides the permanent magnet synchronous machine (PMSM) block is shown in Figure 2.
There are two main blocks, namely (i) electrical model, (ii) mechanical model.
I find out there is a discrete-time integrator (see Figure 3) in the electrical model and mechanical model.
The simulation configurations are given in Figure 4, i.e. Solver Type: Fixed-step, Solver: ODE4.
Questions:
[1] May I know why "discrete-time integrator" is used in PMSM instead of "continuous-time integrator" (1/s)? If I'm not mistaken, in real world, the states in PMSM is continuous.
[2] In my opinion, in practice, all the states in PMSM are in continuous-time domain, whilst all the states in digital controller are in discrete-time domain. If I wish to model the PMSM using continous-time components (e.g. 1/s), and the digital controller with discrete-time components (e.g. the discrete-time integrator), which solver type that I should use? Fixed- or Variable-step? Discrete (no continuous states) or others?
Kindly advise.
Thank you very much.
Figure 1.
Figure 2.
Figure 3.
Figure 4.