Rahul Kumar Vashistha
Newbie level 4

- Joined
- Mar 5, 2015
- Messages
- 7
- Helped
- 0
- Reputation
- 0
- Reaction score
- 0
- Trophy points
- 1
- Activity points
- 83
guys please help me out!
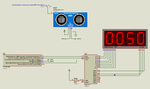
i am trying to interface two ultrasonic sensors(HC-SR04) with pic16f877a and accordingly have written the code as shown below:-
tried simulating in proteus but i am getting undesired o/p.
please help..
i am trying to interface two ultrasonic sensors(HC-SR04) with pic16f877a and accordingly have written the code as shown below:-
Code C - [expand]
tried simulating in proteus but i am getting undesired o/p.
please help..


")