Welcome to our site! EDAboard.com is an international Electronics Discussion Forum focused on EDA software, circuits, schematics, books, theory, papers, asic, pld, 8051, DSP, Network, RF, Analog Design, PCB, Service Manuals... and a whole lot more! To participate you need to register. Registration is free. Click here to register now.
What's your frequency of operation? Whatever it is, set a timestep so between 100 and 1 million of them fit in one switching period.
Another thing to try is to put low-ohm resistors inline with capacitors, inductors, diodes. If there is zero resistance, the simulator is unable to calculate a time constant as RxC or L/R.
Sir, i tried both method provided by you , but still i m getting time step is too low.
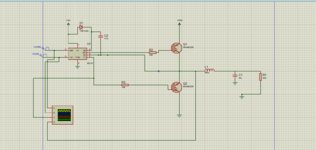
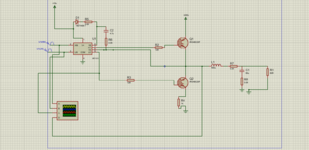
Is there any problem with my circuit ?? basically I am simulating an IGBT driver circuit, with RLC load.
1.
The node at R7 R1 C1 has no dot indicating a join. Elsewhere your schematic does have dots where 3 wires join.
2.
Wires below R6 have dots indicating joins in unexpected spots. Make sure there is no rogue wire overlapping other wires since the overlap mimics an optical illusion of continuous wire. Make sure wires that should be connected really are connected.
3.
Make sure the node between Q1 Q2 really has 4 wires joining.
This is a common problem as you can see from the list of similar threads further down this page. You may find a solution among those.
A common recommendation is to connect a high-ohm resistor from transistor bias to the emitter or source terminal. This sets the bias to a definite value as the run begins, so you do not have any floating inputs. (For N devices the source is the more negative terminal.)
hello , I am trying to code variable duty cycle PWM on PIC16F877A, desired frequency 2Khz, using Timer2 interrupts. But I am not getting PWM on oscilloscope .
please tell where i am doing mistake. (Code is written using MPlab)
hello everyone, I am trying to code variable duty cycle PWM on PIC16F877A, desired frequency 2Khz, using Timer2 interrupts. But I am not getting PWM on oscilloscope .
please tell where i am doing mistake. (Code is written using MPlab)
This site uses cookies to help personalise content, tailor your experience and to keep you logged in if you register.
By continuing to use this site, you are consenting to our use of cookies.