neazoi
Advanced Member level 6

- Joined
- Jan 5, 2008
- Messages
- 4,157
- Helped
- 13
- Reputation
- 26
- Reaction score
- 15
- Trophy points
- 1,318
- Location
- Greece
- Activity points
- 37,198
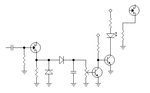
Hello, I have made an oscillator and I set it's ALC by feeding it's output to a diode rectifier and towards the oscillator again using a incadescent lamp and LDR combination.
The ALC works ok but I see amplitude variations, the amplitude goes up and down a little. How can I stabilize the loop for stable amplitude?
The ALC works ok but I see amplitude variations, the amplitude goes up and down a little. How can I stabilize the loop for stable amplitude?