Anantha Krishna
Member level 1
Hi All,
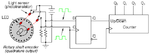
I am using MOC7811 to detect the angle of a wheel. I have attached a small wheel with 90 slotted cuts, which cuts the connection between receiver and the transmitter of MOC7811, and by detecting the edges, I can measure the angle.
I am using two optos adjacent to each other, through which I will able to measure 360 degrees.[i.e. each opto will give two edges for each slot. The small wheel contains 90 slots. So each opto gives 180 deg. Totally 360 deg].
Please see the attached image of the MOC7811 circuit that I am using.
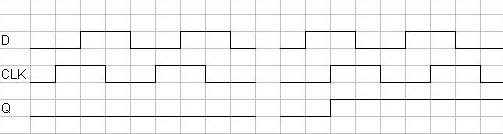
Detecting the angle in single direction is easy. I am not able to figure out how to measure angle in both +ve and -ve directions. i.e. The indicator should show +ve angle in clockwise and -ve angle in anticlockwise directions.
Please someone help to solve this problem.
Thank you.

I am using MOC7811 to detect the angle of a wheel. I have attached a small wheel with 90 slotted cuts, which cuts the connection between receiver and the transmitter of MOC7811, and by detecting the edges, I can measure the angle.
I am using two optos adjacent to each other, through which I will able to measure 360 degrees.[i.e. each opto will give two edges for each slot. The small wheel contains 90 slots. So each opto gives 180 deg. Totally 360 deg].
Please see the attached image of the MOC7811 circuit that I am using.
Detecting the angle in single direction is easy. I am not able to figure out how to measure angle in both +ve and -ve directions. i.e. The indicator should show +ve angle in clockwise and -ve angle in anticlockwise directions.
Please someone help to solve this problem.
Thank you.