PA3040
Advanced Member level 3
Dear All
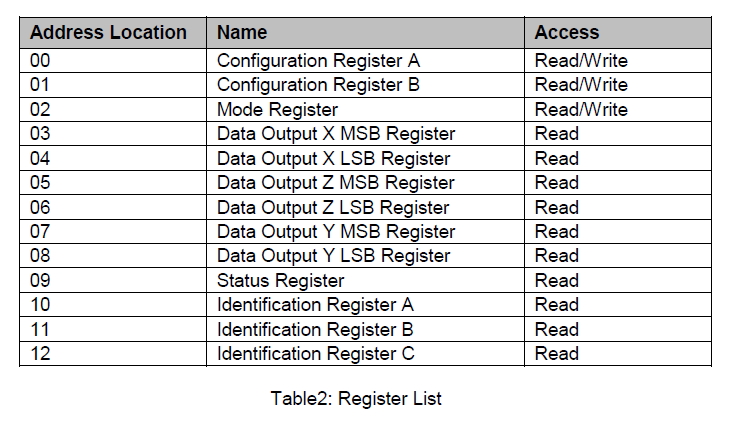
I need to write a program for above Compass and result should put to the LCD
Can I have the sample code only for compass reading and writing part
I am using 16f877a mcu
I did not see this module(HMC5883L) in the proteus and any body could know similer part number that existing Proteus please advice
Thanks in advance
I need to write a program for above Compass and result should put to the LCD
Can I have the sample code only for compass reading and writing part
I am using 16f877a mcu
I did not see this module(HMC5883L) in the proteus and any body could know similer part number that existing Proteus please advice
Thanks in advance