GH Crash
Member level 1
I need some help in determining what is causing the voltage regulator to get hot in a simple circuit. Can you give me some ideas of how to find out what is causing the problem? Or, how to fix the problem?
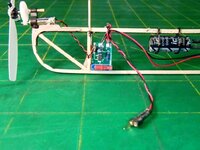
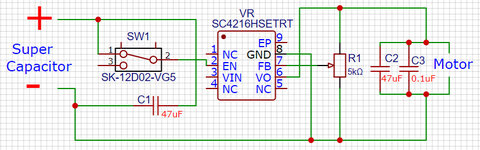
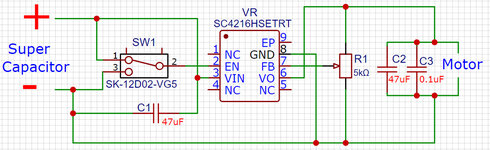
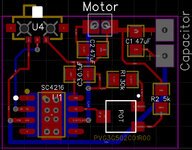
The circuit consists of a super capacitor, acting as the source, a variable output LDO voltage regulator, and a small DC motor. The voltage regulator chip is Semtech's SC4216HSETRT. It is rated for input voltages from 1.4 to 7 volts and current flow up to 3 amps. The super capacitor is rated at 7.5F at 5.4 volts. The motor is a brushed 7mm by 20mm coreless DC motor rated for 3.7 volts. The motor draws less than 1.5 amps at 3.7v under load. Capacitors have been added to the circuit as suggested by the SC4216 datasheet. A diagram of the circuit is attached. (It is almost exactly like the typical application circuit shown in the SC4216H data sheet.)
Prior to a test run, the voltage regulator's output voltage is set to 2.0 volts using a voltmeter and a separate bench-top power supply. The super capacitor is charged, using an external charger, to 4.0 volts prior to start of the test. The problem is that the voltage regulator chip gets too hot to touch within about 2 to 3 seconds of energizing the circuit.
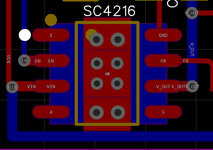
I've added a second heat dissipation pad to the back of the PCB boards. Through board solder paths exists to tie the bottom pad to the surface pad. This didn't have appreciable effect other slightly the time interval before the IC was too hot to touch.
I've tried changing output voltage settings. Although it seemed the the voltage regulator IC took a little longer to heat up at higher output voltage settings, changing the output voltage didn't have an appreciable effects.
I've checked the voltage of the capacitor and it drops less than 0.2 volts under load.
I don't have a scope.
Can you help me to determine what is going on? And how to fix it? What is the cause of the excessive heating? I know that there will be some heat generated during normal operation but I can't understand why the chip gets so hot when it is operation in the middle of it designed operating range?
I'm sure that I have failed to mention something. Please feel free to ask question.
George
The circuit consists of a super capacitor, acting as the source, a variable output LDO voltage regulator, and a small DC motor. The voltage regulator chip is Semtech's SC4216HSETRT. It is rated for input voltages from 1.4 to 7 volts and current flow up to 3 amps. The super capacitor is rated at 7.5F at 5.4 volts. The motor is a brushed 7mm by 20mm coreless DC motor rated for 3.7 volts. The motor draws less than 1.5 amps at 3.7v under load. Capacitors have been added to the circuit as suggested by the SC4216 datasheet. A diagram of the circuit is attached. (It is almost exactly like the typical application circuit shown in the SC4216H data sheet.)
Prior to a test run, the voltage regulator's output voltage is set to 2.0 volts using a voltmeter and a separate bench-top power supply. The super capacitor is charged, using an external charger, to 4.0 volts prior to start of the test. The problem is that the voltage regulator chip gets too hot to touch within about 2 to 3 seconds of energizing the circuit.
I've added a second heat dissipation pad to the back of the PCB boards. Through board solder paths exists to tie the bottom pad to the surface pad. This didn't have appreciable effect other slightly the time interval before the IC was too hot to touch.
I've tried changing output voltage settings. Although it seemed the the voltage regulator IC took a little longer to heat up at higher output voltage settings, changing the output voltage didn't have an appreciable effects.
I've checked the voltage of the capacitor and it drops less than 0.2 volts under load.
I don't have a scope.
Can you help me to determine what is going on? And how to fix it? What is the cause of the excessive heating? I know that there will be some heat generated during normal operation but I can't understand why the chip gets so hot when it is operation in the middle of it designed operating range?
I'm sure that I have failed to mention something. Please feel free to ask question.
George
") .
.