FecP
Newbie level 6
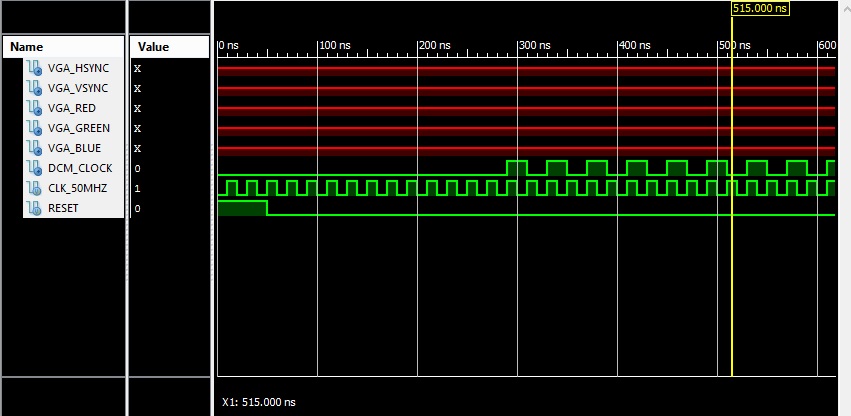
The input clock is at 50 Mhz and I need the output (clk) at 25 Mhz.
If the clocked output isn't "LOCKED" , should a new reset signal be sent every clock cycle? I've used the enable counter to provide a delay between successive reset pulses i.e(give clock manager time to lock)? And a shift register to make the rst_in to last 3 seconds.
P.S. Is this the right way to reset a DCM? Wouldn't it be better if I tied the DCM 'rst_in' to the external reset? assign rst_in = RESET (From FPGA button)?

Code Verilog - [expand]
If the clocked output isn't "LOCKED" , should a new reset signal be sent every clock cycle? I've used the enable counter to provide a delay between successive reset pulses i.e(give clock manager time to lock)? And a shift register to make the rst_in to last 3 seconds.
P.S. Is this the right way to reset a DCM? Wouldn't it be better if I tied the DCM 'rst_in' to the external reset? assign rst_in = RESET (From FPGA button)?