vikas_verma
Junior Member level 1
hello everyone!
i'm working on my final year project that is a remote control car like a toy car but the difference is that i'm moving its front wheel like real one and it's speed too.
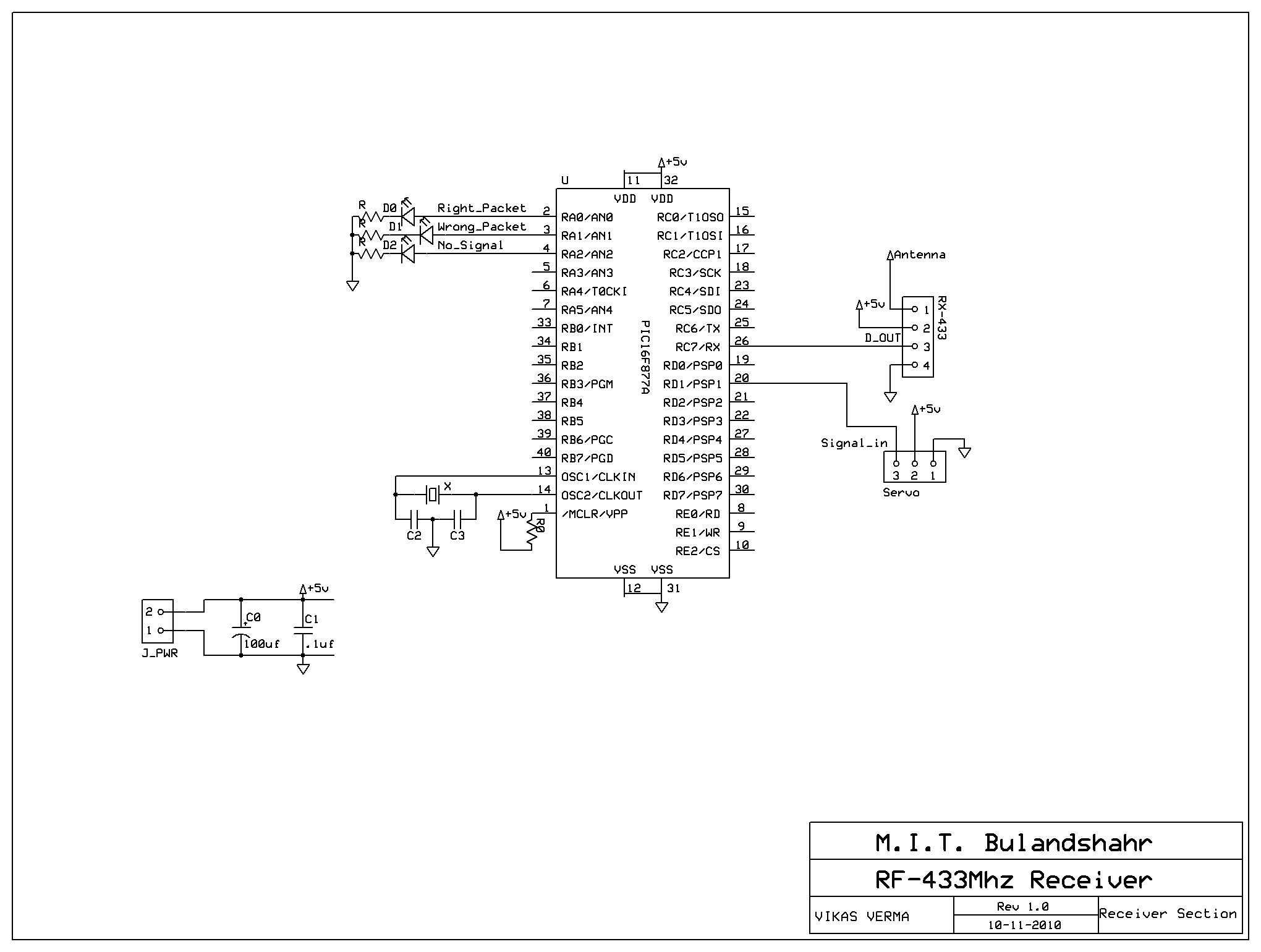
The problem i'm facing is in communication.i'm using simple 433Mhz rf modules,
PIC16f877A in transmitter and PIC16F628A as a receiver.problems are:
1. Receiving pic get blows when i connect it with RF receiver. (PICKIT2 doesn't detect it afterward ).
2. i want to send 2 bytes data so what should be the algorithm.
:-( please help me i've got few days to submit the project!
i'm working on my final year project that is a remote control car like a toy car but the difference is that i'm moving its front wheel like real one and it's speed too.
The problem i'm facing is in communication.i'm using simple 433Mhz rf modules,
PIC16f877A in transmitter and PIC16F628A as a receiver.problems are:
1. Receiving pic get blows when i connect it with RF receiver. (PICKIT2 doesn't detect it afterward ).
2. i want to send 2 bytes data so what should be the algorithm.
:-( please help me i've got few days to submit the project!