David_
Advanced Member level 2

- Joined
- Dec 6, 2013
- Messages
- 573
- Helped
- 8
- Reputation
- 16
- Reaction score
- 8
- Trophy points
- 1,308
- Location
- Sweden
- Activity points
- 12,242
Swithing regulator loop stability & compensation.
Hello.
I have designed acircuit based on LTC3864, step-down dc/dc controller.
I found out that Linear Technology has a power supply design program that contains my regulator so I have been exploring that and with encouraging results, kind of.
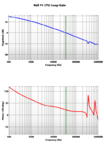
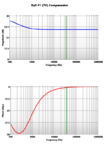
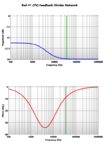
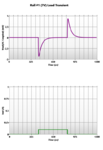
The thing is I don't understand the following picture:

I do get that the graphs are results from the loop compensation component values chosen, but facing the fact that I do not get what there suppose to do(I have read about it and the purpose seems clear but how and what different values matter where is another thing)
Do you know why the phase respond is smooth up until 100kHz and the goes crazy?
Seeing as this will be used to output 3-33V 0-3A I have to find some way of compensating the loop over the hole range but that does not seem possible, do you know?
I can't manage to get the phase margin high enough and it gets to <10 at its smallest, do any one know what causes this and how to improve it?
I'm flying blind.
- - - Updated - - -
Sorry for the picture, I will upload full pictures asap.
- - - Updated - - -
Here are the graphs of where I'm at now, the schematic page wont work but I'll get it somehow.
Hello.
I have designed acircuit based on LTC3864, step-down dc/dc controller.
I found out that Linear Technology has a power supply design program that contains my regulator so I have been exploring that and with encouraging results, kind of.
The thing is I don't understand the following picture:
I do get that the graphs are results from the loop compensation component values chosen, but facing the fact that I do not get what there suppose to do(I have read about it and the purpose seems clear but how and what different values matter where is another thing)
Do you know why the phase respond is smooth up until 100kHz and the goes crazy?
Seeing as this will be used to output 3-33V 0-3A I have to find some way of compensating the loop over the hole range but that does not seem possible, do you know?
I can't manage to get the phase margin high enough and it gets to <10 at its smallest, do any one know what causes this and how to improve it?
I'm flying blind.
- - - Updated - - -
Sorry for the picture, I will upload full pictures asap.
- - - Updated - - -
Here are the graphs of where I'm at now, the schematic page wont work but I'll get it somehow.