vish2207
Newbie level 5
Hi Everyone,
My project is to make a Bipolar stepper motor drive using discrete components. I have NEMA 34 86mm 4A 1.8degree stepper motor as a load. I have made drive using two full H bridge which uses IRF540(N Mosfet) and IRF9540(P Mosfet). I am driving these Mosfets using discrete transistors BC547. After few tweaking in the gate drive circuit, now MOSFETs are driven correctly.
I am driving the Motor in the Full step mode which has following waveforms.
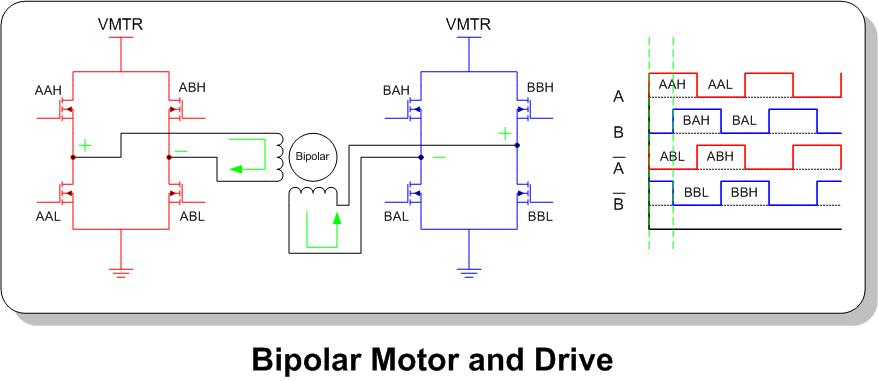
In my case, the time for one step which is shown by two dotted green lines in the waveforms, is kept 1850uS. This time has been decided by lot of iteration of different timings. This creates minimum vibration in the motor and optimum current consumption. Now at this stage the RPM of the motor is around 160. Theorically it is 162.
I want to increase Motor RPM to around 300. If I reduce the step time from 1850uS to 900uS, the motor stalls. What should I do to fix this?
I tried to run the same motor with another small off the shelf drive which is using TB6560 IC from TOSHIBA. If I drive it in full step mode, it gives some where around 300 RPM for the same motor without considerable vibration and limited current.
Thanks in advance,
Vishal Prajapati
My project is to make a Bipolar stepper motor drive using discrete components. I have NEMA 34 86mm 4A 1.8degree stepper motor as a load. I have made drive using two full H bridge which uses IRF540(N Mosfet) and IRF9540(P Mosfet). I am driving these Mosfets using discrete transistors BC547. After few tweaking in the gate drive circuit, now MOSFETs are driven correctly.
I am driving the Motor in the Full step mode which has following waveforms.
In my case, the time for one step which is shown by two dotted green lines in the waveforms, is kept 1850uS. This time has been decided by lot of iteration of different timings. This creates minimum vibration in the motor and optimum current consumption. Now at this stage the RPM of the motor is around 160. Theorically it is 162.
I want to increase Motor RPM to around 300. If I reduce the step time from 1850uS to 900uS, the motor stalls. What should I do to fix this?
I tried to run the same motor with another small off the shelf drive which is using TB6560 IC from TOSHIBA. If I drive it in full step mode, it gives some where around 300 RPM for the same motor without considerable vibration and limited current.
Thanks in advance,
Vishal Prajapati