Jestin_cubetech
Advanced Member level 1

- Joined
- Jun 24, 2012
- Messages
- 499
- Helped
- 76
- Reputation
- 152
- Reaction score
- 73
- Trophy points
- 1,328
- Activity points
- 3,697
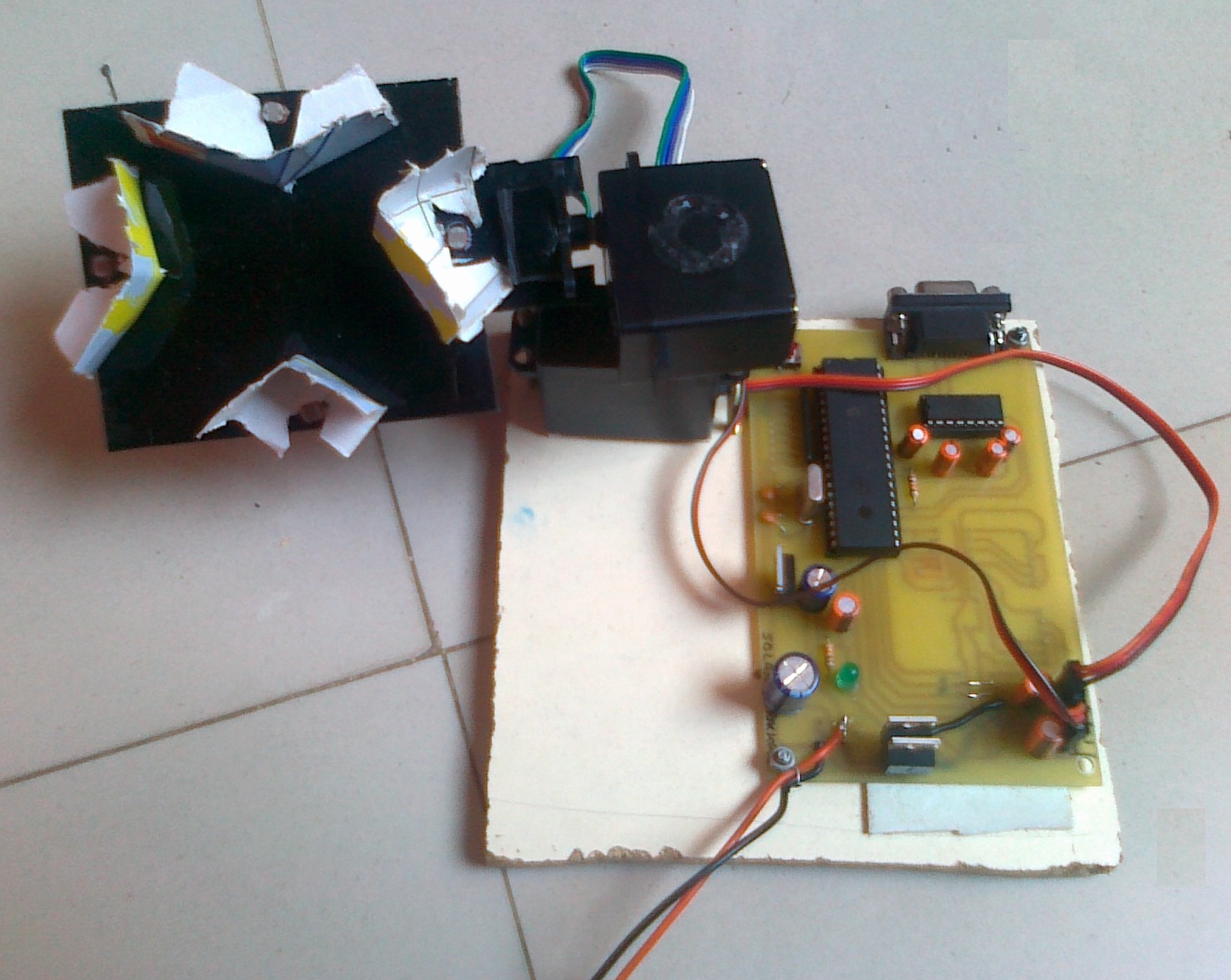
servo based dual axis solar tracker

2 servo motor
4 LDR
PIC16F877A
2 servo motor
4 LDR
PIC16F877A
