mysore
Newbie level 2

- Joined
- Feb 17, 2013
- Messages
- 2
- Helped
- 0
- Reputation
- 0
- Reaction score
- 0
- Trophy points
- 1,281
- Activity points
- 1,298
Hi,
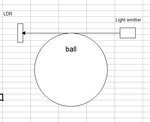
We are doing a project on magnetic levitation of a small steel ball. We were thinking of using an LDR as part of a simple voltage divider circuit and a light source. But the problem is if the ball is equally above or below the centre of the LDR within its cross section, the resistance of the LDR would be the same, and it would not be possible to control the current to the electromagnetic coil as desired. Is there any other way of using the LDR to overcome this problem or is there any other sensor which can be used?
We are doing a project on magnetic levitation of a small steel ball. We were thinking of using an LDR as part of a simple voltage divider circuit and a light source. But the problem is if the ball is equally above or below the centre of the LDR within its cross section, the resistance of the LDR would be the same, and it would not be possible to control the current to the electromagnetic coil as desired. Is there any other way of using the LDR to overcome this problem or is there any other sensor which can be used?