cacing
Junior Member level 1
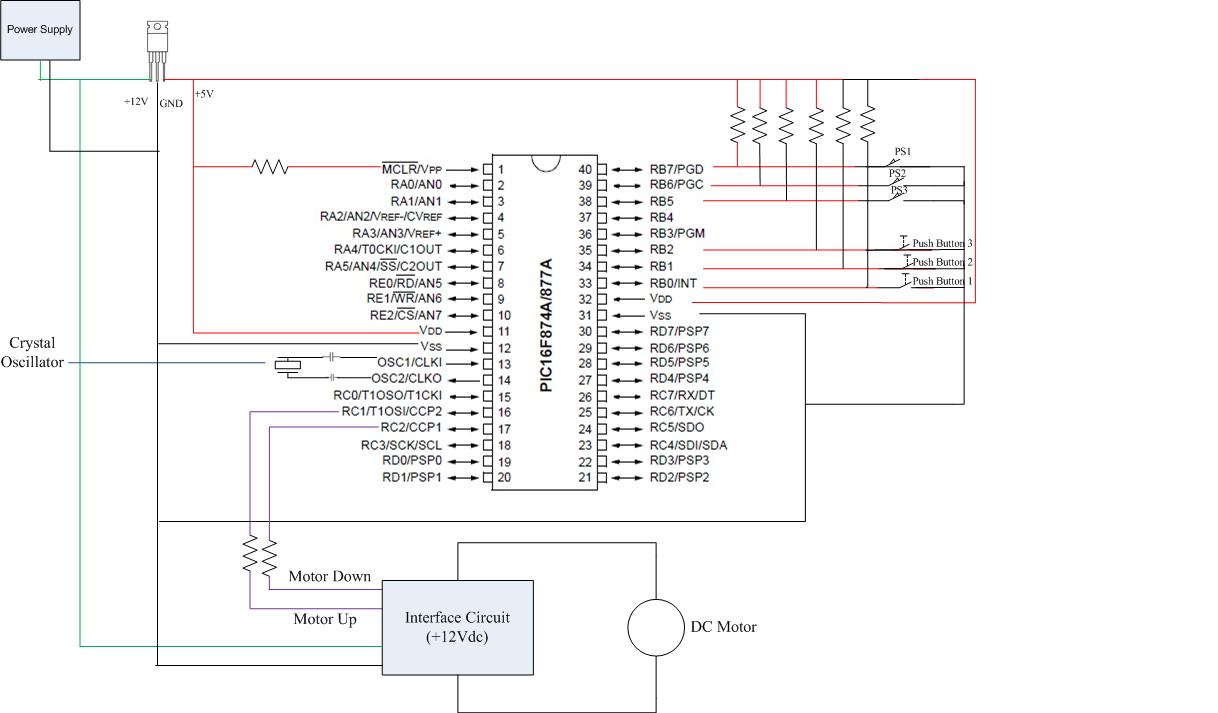
@barry: ohh actually.. i do have resistors for my push button and reed switches before it's connected to my VDD.. it's in my original circuit but when i posted it up here.. it doesn't appear.. sorry i just realised that.. my bad.. does this answer the question for zasto? i am quite a newbie, sorry if i couldn't correctly or having problem in understanding..
 are u trying to say how do i make sure my button is active high or active low status?
are u trying to say how do i make sure my button is active high or active low status?