kunal5959
Junior Member level 3

- Joined
- Jul 26, 2011
- Messages
- 31
- Helped
- 0
- Reputation
- 0
- Reaction score
- 0
- Trophy points
- 1,286
- Activity points
- 1,644
I wanted to implement a simple multithreading code on my ATMEGA128A prtototype board where 4 different tasks would be regulated in a time window such that each thread/ task occors only for a defined period. The task is to set the PORTB6 in one thread and then clear in second and the set and clear again in next threads. Now i am using AVR studio and C language..
I actually used two different programs one introducing delay(_delay_ms(2)) in thread/TASK 1 and other without delay in THread/TASK 1.
i do not understand why the setting of the LED to On or off differs when I use delay_ms(2) as shown in the code.i expected that the 2 ms delay_ms in the code would be ignored while the timer has to run the thread 1 only for 1.4 ms.
Since OCR is set to 1 TIMER0 interrupt is called every 139 us~140us.. I am using a timer counter in my code such that each thread is called at 10x140us,,20X140us,,30X140us,,40X140us...
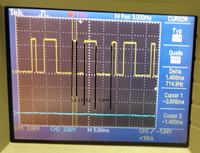
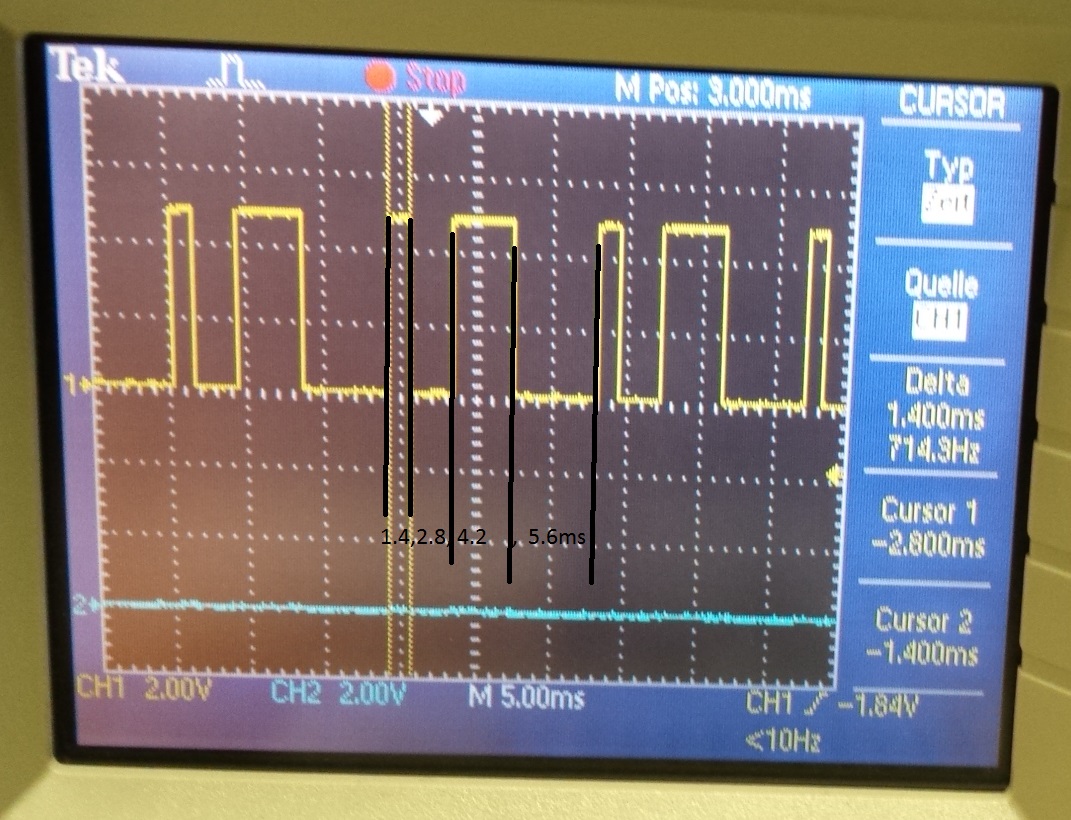
The (1) Oscilloscope Pic shows the toggling without delay and
The (2) Oscill pic shows toggling without a delay.. pic with (1.4,2.8,4.2,5.6)as measured time diff
(1) is the ideal case as it satisfies Toggle duration of (Thread 1->1.4 ms,Thread 2->2.8ms,Thread 3->4.2ms&Thread 4->5.6ms) accordin to my calculation..
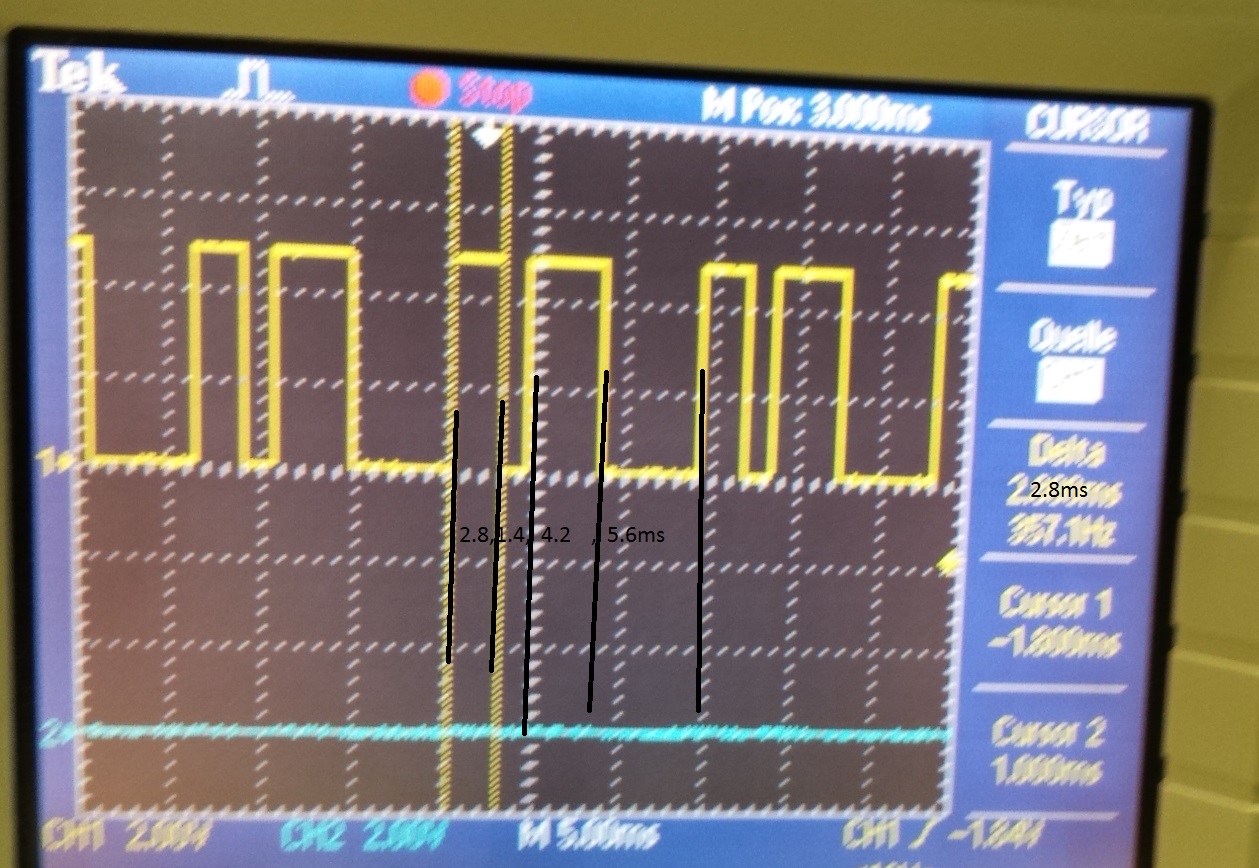
(2) (Thread 1->2.8 ms,Thread 2->1.4ms,Thread 3->4.2ms&Thread 4->5.6ms) this is absurd bcos i expected that the 2 ms delay_ms in the code would be ignored while the timer has to run the thread 1 only for 1.4 ms..??
can anyone help me in understand how the interrupt handles the threads in the second case????

I actually used two different programs one introducing delay(_delay_ms(2)) in thread/TASK 1 and other without delay in THread/TASK 1.
i do not understand why the setting of the LED to On or off differs when I use delay_ms(2) as shown in the code.i expected that the 2 ms delay_ms in the code would be ignored while the timer has to run the thread 1 only for 1.4 ms.
Since OCR is set to 1 TIMER0 interrupt is called every 139 us~140us.. I am using a timer counter in my code such that each thread is called at 10x140us,,20X140us,,30X140us,,40X140us...
The (1) Oscilloscope Pic shows the toggling without delay and
The (2) Oscill pic shows toggling without a delay.. pic with (1.4,2.8,4.2,5.6)as measured time diff
(1) is the ideal case as it satisfies Toggle duration of (Thread 1->1.4 ms,Thread 2->2.8ms,Thread 3->4.2ms&Thread 4->5.6ms) accordin to my calculation..
(2) (Thread 1->2.8 ms,Thread 2->1.4ms,Thread 3->4.2ms&Thread 4->5.6ms) this is absurd bcos i expected that the 2 ms delay_ms in the code would be ignored while the timer has to run the thread 1 only for 1.4 ms..??
can anyone help me in understand how the interrupt handles the threads in the second case????
Code C - [expand]
Last edited:

