Srikrishna
Newbie level 4
Hi!!
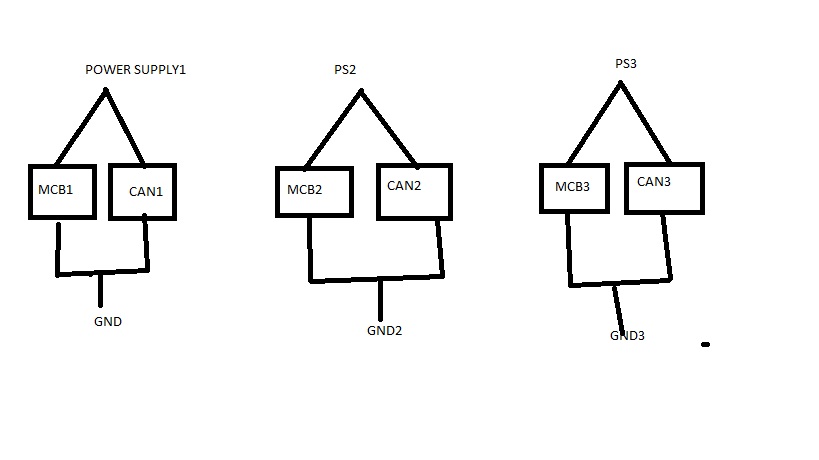
My goal is to network two Motor Control PCBs through the CAN protocol.
The problem here is regarding Ground. Is it that all nodes on the CAN bus need to have a common ground?? If is..what is the effect of the common ground on the CAN transceivers present on each board...
My goal is to network two Motor Control PCBs through the CAN protocol.
The problem here is regarding Ground. Is it that all nodes on the CAN bus need to have a common ground?? If is..what is the effect of the common ground on the CAN transceivers present on each board...