HAIDE
Junior Member level 3

- Joined
- Feb 9, 2012
- Messages
- 27
- Helped
- 0
- Reputation
- 0
- Reaction score
- 0
- Trophy points
- 1,281
- Location
- GERMANY
- Activity points
- 1,525
Hi,
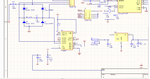
I design a circuit by DC motor, which controlled by micro controller(using PWM), I want to control a 24 volt dc motor by L298, I have designed a schematic file but I'm not sure this is works, I atached the both schematcs in pdf and a part of circuit in image and also PCB, any idea?:idea:
Also another question is L298 is proper choice to control 24 volt DC motor?
I design a circuit by DC motor, which controlled by micro controller(using PWM), I want to control a 24 volt dc motor by L298, I have designed a schematic file but I'm not sure this is works, I atached the both schematcs in pdf and a part of circuit in image and also PCB, any idea?:idea:
Also another question is L298 is proper choice to control 24 volt DC motor?