giordano
Newbie level 5

- Joined
- Nov 28, 2012
- Messages
- 8
- Helped
- 0
- Reputation
- 0
- Reaction score
- 0
- Trophy points
- 1,281
- Location
- Indonesia
- Activity points
- 1,376
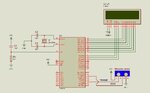
I want to make a project to measure distance using ultrasonic sensor HC-S*04 and LCD to display the distance in cm. I use AT89C51, the trigger pin for ultrasonic sensor is P3.5 and the echo pin is P3.2. The echo pin is connected to P3.2 because I use interrupt so that whenever there is a HIGH it will activate timer 0 and the duration of HIGH condition (in microsecond) will be converted to cm (divided by 59). I already make sure that the ultrasonic sensor works well. The problem is the LCD always display output the same number 45. It is not varying although the distance between object and ultrasonic sensor change. Can anyone help me to solve this problem?
Code C - [expand]