tolly8210
Newbie level 4

Dear All,
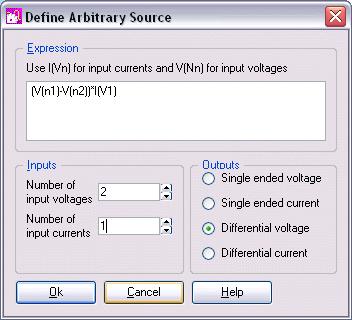
I want to model a nonlinear resistor behavior whose V-I relation is as V=R1*I+R2*I^3 = (R1+R2*I^2)I.
I face this problem when I try to establish a equivalent circuit model for a nonlinear mechanical system.
For a linear single DOF mechanical system. Mx''+Dx'+Kx=F, where M is the mass; D damping, K stiffness, F force, x is displacement. if we analogize it as a electrical system: Lq''+Rq'+q/C=V, where L is equivalent to M, R is equivalent to D, 1/C is equivalent to K, voltage source V is equivalent to F, charge q is equivalent to x. by such equivalent circuit model, we can predict the mechanical system response by electrical simulation in SPICE software.
Now, I have a nonlinear system. The damping term is nonlinear, D1x'+D2x'^3 (for circuit equivalence, R1*I+R2*I^3=(R1+R2*I^2)*I ). if I can model such nonlinear resistance behavior, I can predict the mechanical performance by circuit simulation.
Any suggestion or implementation experience?
Thanks in advance.
I want to model a nonlinear resistor behavior whose V-I relation is as V=R1*I+R2*I^3 = (R1+R2*I^2)I.
I face this problem when I try to establish a equivalent circuit model for a nonlinear mechanical system.
For a linear single DOF mechanical system. Mx''+Dx'+Kx=F, where M is the mass; D damping, K stiffness, F force, x is displacement. if we analogize it as a electrical system: Lq''+Rq'+q/C=V, where L is equivalent to M, R is equivalent to D, 1/C is equivalent to K, voltage source V is equivalent to F, charge q is equivalent to x. by such equivalent circuit model, we can predict the mechanical system response by electrical simulation in SPICE software.
Now, I have a nonlinear system. The damping term is nonlinear, D1x'+D2x'^3 (for circuit equivalence, R1*I+R2*I^3=(R1+R2*I^2)*I ). if I can model such nonlinear resistance behavior, I can predict the mechanical performance by circuit simulation.
Any suggestion or implementation experience?
Thanks in advance.



")