ishailesh
Junior Member level 3
- Joined
- Apr 4, 2012
- Messages
- 31
- Helped
- 6
- Reputation
- 12
- Reaction score
- 6
- Trophy points
- 1,288
- Location
- New Delhi, India
- Activity points
- 1,652
Hey all!
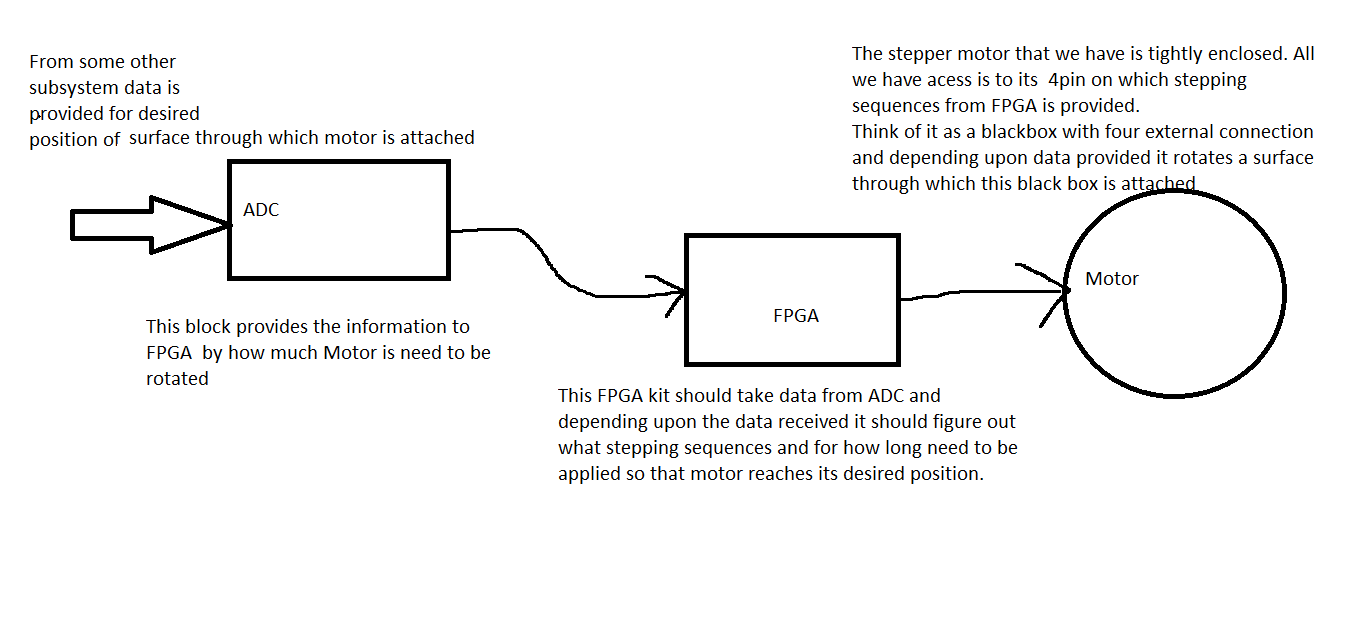
I am driving a stepper motor through FPGA ( Xilinx Virtex 2 Pro Board)
Here i have given some stepping sequences to it and it keep on running continuously.
Now i want that it should take some digital data and depending upon the data received it should rotate to some degree and stop.
Basically the idea is to make it work in a closed loop.
Please guide on the same how it can be achieved.
I am driving a stepper motor through FPGA ( Xilinx Virtex 2 Pro Board)
Here i have given some stepping sequences to it and it keep on running continuously.
Now i want that it should take some digital data and depending upon the data received it should rotate to some degree and stop.
Basically the idea is to make it work in a closed loop.
Please guide on the same how it can be achieved.