KlausST
Advanced Member level 7
Hi,
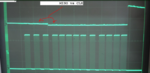
Time flow in a scope picture is left to right.
Thus I fully agree with Susan. What you call "rising edge" indeed is "falling edge".
Klaus
Time flow in a scope picture is left to right.
Thus I fully agree with Susan. What you call "rising edge" indeed is "falling edge".
Klaus