ecaits
Member level 4

Difference in two similar LDR Characteristic in two axis sun tracking system
Dear Friends,
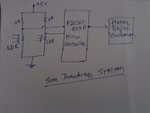
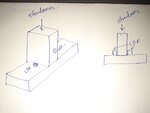
I am working on sun tracking system in which I am using two similar LDR to sense the intensity of sun by shadow method.
But the characteristic of both similar LDR are different means at the same light intensity, both LDR shows different resistance.
By using voltage divider circuit, I will detect the analog signal and provide to micro controller for comparison and accordingly I will operate the motor drive.
To solve the issue I need to use two similar LDR which have same characteristic.
Can anyone suggest me the LDR which have same characteristic or any other option?
Plz find the attached images for reference.
Thanks,
Dear Friends,
I am working on sun tracking system in which I am using two similar LDR to sense the intensity of sun by shadow method.
But the characteristic of both similar LDR are different means at the same light intensity, both LDR shows different resistance.
By using voltage divider circuit, I will detect the analog signal and provide to micro controller for comparison and accordingly I will operate the motor drive.
To solve the issue I need to use two similar LDR which have same characteristic.
Can anyone suggest me the LDR which have same characteristic or any other option?
Plz find the attached images for reference.
Thanks,
Attachments
Last edited:

