Electro nS
Full Member level 6

- Joined
- Mar 9, 2013
- Messages
- 324
- Helped
- 49
- Reputation
- 98
- Reaction score
- 48
- Trophy points
- 1,308
- Activity points
- 3,818
hello guys
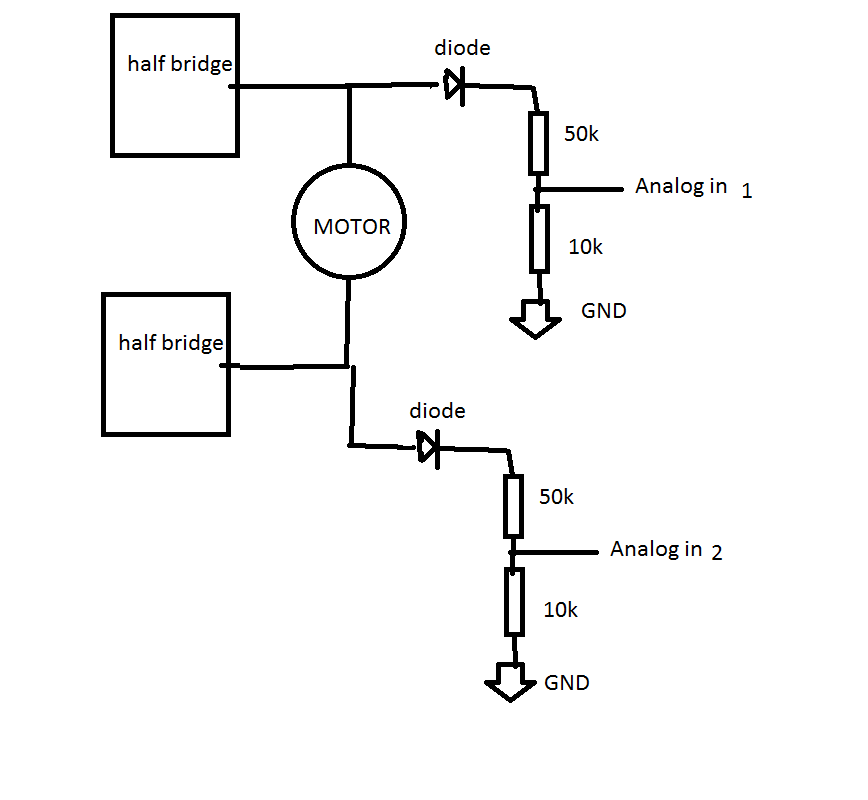
i want to control the speed of brushed dc motor in a closed loop mode (12v 300W dc motor) . i am using H bridge for bidirectional operation . and i have implemented current sensors for protection.
I CANNOT install encoders to the motors , very difficult mechanically . I Am trying to escape from back emf measurment , they say its complex electronically . (extra harware , noise ....)
I have read somewhere
https://prezi.com/ch0a650pnbkf/speed-control-of-h-bridge-controlled-dc-motors/
https://obrazki.elektroda.pl/1018953600_1381759337.png
that you can use current to measure speed ( even if not presice , its OK ) that would be great since the sensors are already implemented and no hardware change is needed
but cannot understand how does that work , isn't current related to torque not speed ??
please help . any information would be appreaciated
i want to control the speed of brushed dc motor in a closed loop mode (12v 300W dc motor) . i am using H bridge for bidirectional operation . and i have implemented current sensors for protection.
I CANNOT install encoders to the motors , very difficult mechanically . I Am trying to escape from back emf measurment , they say its complex electronically . (extra harware , noise ....)
I have read somewhere
https://prezi.com/ch0a650pnbkf/speed-control-of-h-bridge-controlled-dc-motors/
https://obrazki.elektroda.pl/1018953600_1381759337.png
that you can use current to measure speed ( even if not presice , its OK ) that would be great since the sensors are already implemented and no hardware change is needed
but cannot understand how does that work , isn't current related to torque not speed ??
please help . any information would be appreaciated