kel
Newbie level 4

Gentlemen,
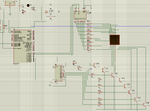
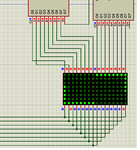
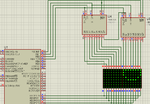
I'm having problem displaying message on my 8x8 dot matrix display. I've modified a small c code rewriting it in C using CCS C compiler. In as far as my hardware is concern, I'm using a pic16f877a, a 74HC595, NPN transistors and a CD4017.As you would note in code, the serial data pin is connected to PIN_D2 and a function has been written to emulate serial port. Scrolling is as expected except that the message being displayed is unrecognizable and random.The code is as attached below. Would you kindly assist.
Appreciate your help in advance.
I'm having problem displaying message on my 8x8 dot matrix display. I've modified a small c code rewriting it in C using CCS C compiler. In as far as my hardware is concern, I'm using a pic16f877a, a 74HC595, NPN transistors and a CD4017.As you would note in code, the serial data pin is connected to PIN_D2 and a function has been written to emulate serial port. Scrolling is as expected except that the message being displayed is unrecognizable and random.The code is as attached below. Would you kindly assist.
Appreciate your help in advance.
Code:
#include <16F877A.h>
#include <string.h>
//#device adc=10
#fuses HS,NOWDT,NOPROTECT,NOBROWNOUT,NOLVP,NOPUT,NOWRT,NODEBUG,NOCPD
#use delay(clock=20000000)
#define mask 0x01
#define Shift 8
#define ButInput PIN_E0
// Define LCD module connections.
/* sbit Serial_Data at LATC2_bit;
SH_Clk at LATC6_bit;
ST_Clk at LATC7_bit;
CD4017_Clk at LATA2_bit;
CD4017_RST at LATA1_bit;*/
#define SH_CLK PIN_D0
#define ST_CLK PIN_D1
#define SER_DATA PIN_D2
#define CD4017_CLK PIN_D3
#define CD4017_RST PIN_D4
char columns [8] ={1,2,4,8,16,32,64,128};
//char const pat[8]={0x3f,0x02,0x04,0x02,0x3f,0xff,0x06, 0x0f};
const unsigned char CharData[][8] ={
{0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000},
{0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000000, 0b00000100},
{0b00001010, 0b00001010, 0b00001010, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000},
{0b00000000, 0b00001010, 0b00011111, 0b00001010, 0b00011111, 0b00001010, 0b00011111, 0b00001010},
{0b00000111, 0b00001100, 0b00010100, 0b00001100, 0b00000110, 0b00000101, 0b00000110, 0b00011100},
{0b00011001, 0b00011010, 0b00000010, 0b00000100, 0b00000100, 0b00001000, 0b00001011, 0b00010011},
{0b00000110, 0b00001010, 0b00010010, 0b00010100, 0b00001001, 0b00010110, 0b00010110, 0b00001001},
{0b00000100, 0b00000100, 0b00000100, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000},
{0b00000010, 0b00000100, 0b00001000, 0b00001000, 0b00001000, 0b00001000, 0b00000100, 0b00000010},
{0b00001000, 0b00000100, 0b00000010, 0b00000010, 0b00000010, 0b00000010, 0b00000100, 0b00001000},
{0b00010101, 0b00001110, 0b00011111, 0b00001110, 0b00010101, 0b00000000, 0b00000000, 0b00000000},
{0b00000000, 0b00000000, 0b00000100, 0b00000100, 0b00011111, 0b00000100, 0b00000100, 0b00000000},
{0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000110, 0b00000100, 0b00001000},
{0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00001110, 0b00000000, 0b00000000, 0b00000000},
{0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000100},
{0b00000001, 0b00000010, 0b00000010, 0b00000100, 0b00000100, 0b00001000, 0b00001000, 0b00010000},
{0b00001110, 0b00010001, 0b00010011, 0b00010001, 0b00010101, 0b00010001, 0b00011001, 0b00001110},
{0b00000100, 0b00001100, 0b00010100, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00011111},
{0b00001110, 0b00010001, 0b00010001, 0b00000010, 0b00000100, 0b00001000, 0b00010000, 0b00011111},
{0b00001110, 0b00010001, 0b00000001, 0b00001110, 0b00000001, 0b00000001, 0b00010001, 0b00001110},
{0b00010000, 0b00010000, 0b00010100, 0b00010100, 0b00011111, 0b00000100, 0b00000100, 0b00000100},
{0b00011111, 0b00010000, 0b00010000, 0b00011110, 0b00000001, 0b00000001, 0b00000001, 0b00011110},
{0b00000111, 0b00001000, 0b00010000, 0b00011110, 0b00010001, 0b00010001, 0b00010001, 0b00001110},
{0b00011111, 0b00000001, 0b00000001, 0b00000001, 0b00000010, 0b00000100, 0b00001000, 0b00010000},
{0b00001110, 0b00010001, 0b00010001, 0b00001110, 0b00010001, 0b00010001, 0b00010001, 0b00001110},
{0b00001110, 0b00010001, 0b00010001, 0b00001111, 0b00000001, 0b00000001, 0b00000001, 0b00000001},
{0b00000000, 0b00000100, 0b00000100, 0b00000000, 0b00000000, 0b00000100, 0b00000100, 0b00000000},
{0b00000000, 0b00000100, 0b00000100, 0b00000000, 0b00000000, 0b00000100, 0b00000100, 0b00001000},
{0b00000001, 0b00000010, 0b00000100, 0b00001000, 0b00001000, 0b00000100, 0b00000010, 0b00000001},
{0b00000000, 0b00000000, 0b00000000, 0b00011110, 0b00000000, 0b00011110, 0b00000000, 0b00000000},
{0b00010000, 0b00001000, 0b00000100, 0b00000010, 0b00000010, 0b00000100, 0b00001000, 0b00010000},
{0b00001110, 0b00010001, 0b00010001, 0b00000010, 0b00000100, 0b00000100, 0b00000000, 0b00000100},
{0b00001110, 0b00010001, 0b00010001, 0b00010101, 0b00010101, 0b00010001, 0b00010001, 0b00011110},
{0b00001110, 0b00010001, 0b00010001, 0b00010001, 0b00011111, 0b00010001, 0b00010001, 0b00010001},
{0b00011110, 0b00010001, 0b00010001, 0b00011110, 0b00010001, 0b00010001, 0b00010001, 0b00011110},
{0b00000111, 0b00001000, 0b00010000, 0b00010000, 0b00010000, 0b00010000, 0b00001000, 0b00000111},
{0b00011100, 0b00010010, 0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00010010, 0b00011100},
{0b00011111, 0b00010000, 0b00010000, 0b00011110, 0b00010000, 0b00010000, 0b00010000, 0b00011111},
{0b00011111, 0b00010000, 0b00010000, 0b00011110, 0b00010000, 0b00010000, 0b00010000, 0b00010000},
{0b00001110, 0b00010001, 0b00010000, 0b00010000, 0b00010111, 0b00010001, 0b00010001, 0b00001110},
{0b00010001, 0b00010001, 0b00010001, 0b00011111, 0b00010001, 0b00010001, 0b00010001, 0b00010001},
{0b00011111, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00011111},
{0b00011111, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00010100, 0b00001000},
{0b00010001, 0b00010010, 0b00010100, 0b00011000, 0b00010100, 0b00010010, 0b00010001, 0b00010001},
{0b00010000, 0b00010000, 0b00010000, 0b00010000, 0b00010000, 0b00010000, 0b00010000, 0b00011111},
{0b00010001, 0b00011011, 0b00011111, 0b00010101, 0b00010001, 0b00010001, 0b00010001, 0b00010001},
{0b00010001, 0b00011001, 0b00011001, 0b00010101, 0b00010101, 0b00010011, 0b00010011, 0b00010001},
{0b00001110, 0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00001110},
{0b00011110, 0b00010001, 0b00010001, 0b00011110, 0b00010000, 0b00010000, 0b00010000, 0b00010000},
{0b00001110, 0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00010101, 0b00010011, 0b00001111},
{0b00011110, 0b00010001, 0b00010001, 0b00011110, 0b00010100, 0b00010010, 0b00010001, 0b00010001},
{0b00001110, 0b00010001, 0b00010000, 0b00001000, 0b00000110, 0b00000001, 0b00010001, 0b00001110},
{0b00011111, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100},
{0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00001110},
{0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00001010, 0b00000100},
{0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00010001, 0b00010101, 0b00010101, 0b00001010},
{0b00010001, 0b00010001, 0b00001010, 0b00000100, 0b00000100, 0b00001010, 0b00010001, 0b00010001},
{0b00010001, 0b00010001, 0b00001010, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100},
{0b00011111, 0b00000001, 0b00000010, 0b00000100, 0b00001000, 0b00010000, 0b00010000, 0b00011111},
{0b00001110, 0b00001000, 0b00001000, 0b00001000, 0b00001000, 0b00001000, 0b00001000, 0b00001110},
{0b00010000, 0b00001000, 0b00001000, 0b00000100, 0b00000100, 0b00000010, 0b00000010, 0b00000001},
{0b00001110, 0b00000010, 0b00000010, 0b00000010, 0b00000010, 0b00000010, 0b00000010, 0b00001110},
{0b00000100, 0b00001010, 0b00010001, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000},
{0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00011111},
{0b00001000, 0b00000100, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000},
{0b00000000, 0b00000000, 0b00000000, 0b00001110, 0b00010010, 0b00010010, 0b00010010, 0b00001111},
{0b00000000, 0b00010000, 0b00010000, 0b00010000, 0b00011100, 0b00010010, 0b00010010, 0b00011100},
{0b00000000, 0b00000000, 0b00000000, 0b00001110, 0b00010000, 0b00010000, 0b00010000, 0b00001110},
{0b00000000, 0b00000001, 0b00000001, 0b00000001, 0b00000111, 0b00001001, 0b00001001, 0b00000111},
{0b00000000, 0b00000000, 0b00000000, 0b00011100, 0b00010010, 0b00011110, 0b00010000, 0b00001110},
{0b00000000, 0b00000011, 0b00000100, 0b00000100, 0b00000110, 0b00000100, 0b00000100, 0b00000100},
{0b00000000, 0b00001110, 0b00001010, 0b00001010, 0b00001110, 0b00000010, 0b00000010, 0b00001100},
{0b00000000, 0b00010000, 0b00010000, 0b00010000, 0b00011100, 0b00010010, 0b00010010, 0b00010010},
{0b00000000, 0b00000000, 0b00000100, 0b00000000, 0b00000100, 0b00000100, 0b00000100, 0b00000100},
{0b00000000, 0b00000010, 0b00000000, 0b00000010, 0b00000010, 0b00000010, 0b00000010, 0b00001100},
{0b00000000, 0b00010000, 0b00010000, 0b00010100, 0b00011000, 0b00011000, 0b00010100, 0b00010000},
{0b00000000, 0b00010000, 0b00010000, 0b00010000, 0b00010000, 0b00010000, 0b00010000, 0b00001100},
{0b00000000, 0b00000000, 0b00000000, 0b00001010, 0b00010101, 0b00010001, 0b00010001, 0b00010001},
{0b00000000, 0b00000000, 0b00000000, 0b00010100, 0b00011010, 0b00010010, 0b00010010, 0b00010010},
{0b00000000, 0b00000000, 0b00000000, 0b00001100, 0b00010010, 0b00010010, 0b00010010, 0b00001100},
{0b00000000, 0b00011100, 0b00010010, 0b00010010, 0b00011100, 0b00010000, 0b00010000, 0b00010000},
{0b00000000, 0b00001110, 0b00010010, 0b00010010, 0b00001110, 0b00000010, 0b00000010, 0b00000001},
{0b00000000, 0b00000000, 0b00000000, 0b00001010, 0b00001100, 0b00001000, 0b00001000, 0b00001000},
{0b00000000, 0b00000000, 0b00001110, 0b00010000, 0b00001000, 0b00000100, 0b00000010, 0b00011110},
{0b00000000, 0b00010000, 0b00010000, 0b00011100, 0b00010000, 0b00010000, 0b00010000, 0b00001100},
{0b00000000, 0b00000000, 0b00000000, 0b00010010, 0b00010010, 0b00010010, 0b00010010, 0b00001100},
{0b00000000, 0b00000000, 0b00000000, 0b00010001, 0b00010001, 0b00010001, 0b00001010, 0b00000100},
{0b00000000, 0b00000000, 0b00000000, 0b00010001, 0b00010001, 0b00010001, 0b00010101, 0b00001010},
{0b00000000, 0b00000000, 0b00000000, 0b00010001, 0b00001010, 0b00000100, 0b00001010, 0b00010001},
{0b00000000, 0b00000000, 0b00010001, 0b00001010, 0b00000100, 0b00001000, 0b00001000, 0b00010000},
{0b00000000, 0b00000000, 0b00000000, 0b00011111, 0b00000010, 0b00000100, 0b00001000, 0b00011111},
{0b00000010, 0b00000100, 0b00000100, 0b00000100, 0b00001000, 0b00000100, 0b00000100, 0b00000010},
{0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100, 0b00000100},
{0b00001000, 0b00000100, 0b00000100, 0b00000100, 0b00000010, 0b00000100, 0b00000100, 0b00001000},
{0b00000000, 0b00000000, 0b00000000, 0b00001010, 0b00011110, 0b00010100, 0b00000000, 0b00000000}
};
void send_data(unsigned char tmp);
unsigned char DisplayBuffer[]={0,0,0,0,0,0,0,0};
unsigned int speed;
char i, l, k, ShiftAmount, scroll, temp, shift_step=1, StringLength;
char message[]="SCROLLING MESSAGE ON LED DOT-MATRIX DISPLAY FROM WWW.EMBEDDED-LAB.COM ";
char index;
void main()
{
//unsigned int8 i,j,k;
unsigned int16 cnt;
unsigned char num, column, repeat, count;
set_tris_b(0b00000000); //all output 0b00000000
set_tris_d(0b00000000); //all output 0b00000000
set_tris_e(0b00000001); //PORTE bit 0 is input
cnt = 0L;
k = 0;
output_b(0x00);
output_d(0x00);
StringLength = strlen(message) ;
while(TRUE)
{
//loops();
for (k=0; k<StringLength; k++)
{
for (scroll=0; scroll<(8/shift_step); scroll++)
{
for (ShiftAmount=0; ShiftAmount<8; ShiftAmount++)
{
index = message[k];
temp = CharData[index-32][ShiftAmount];
//DisplayBuffer[ShiftAmount] = temp;
//DisplayBuffer[ShiftAmount] = (temp << shift_step)| (temp >> ((8-shift_step)-scroll*shift_step));
DisplayBuffer[ShiftAmount] = (DisplayBuffer[ShiftAmount] << shift_step)| (temp >> ((8-shift_step)-scroll*shift_step));
}
speed = 5; //55;//+ADC_Read(0)/10;
for(l=0; l<speed;l++)
{
for (i=0; i<8; i++)
{
//send_data_serially(DisplayBuffer[i]);
send_data(DisplayBuffer[i]);
//send_data(CharData[i]);
output_high(CD4017_CLK);
output_low (CD4017_CLK);
Delay_ms(1);
} // i
output_high(CD4017_RST);//CD4017_RST = 1;
output_low (CD4017_RST); //CD4017_RST = 0;
for(i = 0; i < 8; i++)
DisplayBuffer[i]=0;
} // l
} // scroll
} //
}
}
void send_data(unsigned char tmp)
{
unsigned int16 Flag;
unsigned char t;
unsigned int16 msk;
msk = 0x0001;
for (t=0; t<8; t++)
{
Flag = tmp & msk;
if(Flag==0) output_low(SER_DATA); //Serial_Data = 0;
else output_high(SER_DATA); //Serial_Data = 1;
output_high(SH_CLK); //SH_CLK = 1;
output_low(SH_CLK); //SH_CLK = 0;
msk = msk << 1;
}
// Apply clock on ST_Clk
output_high(ST_CLK); //ST_CLK = 1;
output_low (ST_CLK); //ST_CLK = 0;
}