player80
Full Member level 2
Hi,
I have installed a 400w servo on a portal but after some time it seems like that the servo is losing the position due to noise it seems, it's just a few steps the result will be that the gantry will be off for like 0.5mm after 20 min operation.
When measuring with the oscilloscope I see some noise spikes on the DIR / STEP pin interface.
The system is controlled via a microcontroller board which is connected to a buffer (74xx), the buffer is connected to the external servo driver.
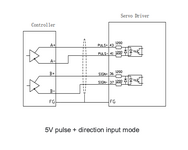
In the servo driver manual I saw that the input is meant to be driven via a differential signal, is that really a common way to connect to servo drivers? (could someone tell me which IC to use to generate a differential signal for such a purpose?) The input is supposed to be 5V.
Aside of that there's another problem at that location that there's no grounding available where the machine is deployed, I know that this can be potentially dangerous but I have to get through that before I can move the equipment.
In case this is not the right place to ask about high voltage ac servos, can anyone recommend a better place to ask?
I certainly still have to learn quite a bit about that topic. I'm currently away from that setup for 3 weeks (so I cannot show any pictures or oscillator plots before I go to that place again).
I have installed a 400w servo on a portal but after some time it seems like that the servo is losing the position due to noise it seems, it's just a few steps the result will be that the gantry will be off for like 0.5mm after 20 min operation.
When measuring with the oscilloscope I see some noise spikes on the DIR / STEP pin interface.
The system is controlled via a microcontroller board which is connected to a buffer (74xx), the buffer is connected to the external servo driver.
In the servo driver manual I saw that the input is meant to be driven via a differential signal, is that really a common way to connect to servo drivers? (could someone tell me which IC to use to generate a differential signal for such a purpose?) The input is supposed to be 5V.
Aside of that there's another problem at that location that there's no grounding available where the machine is deployed, I know that this can be potentially dangerous but I have to get through that before I can move the equipment.
In case this is not the right place to ask about high voltage ac servos, can anyone recommend a better place to ask?
I certainly still have to learn quite a bit about that topic. I'm currently away from that setup for 3 weeks (so I cannot show any pictures or oscillator plots before I go to that place again).