Barbarawi
Junior Member level 2
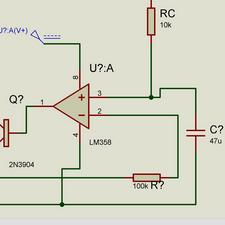
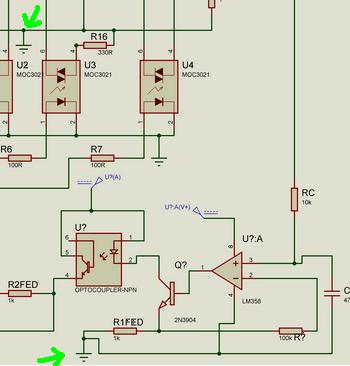
in my project , Single Phase Fully controlled rectifier with DC motor as a LOAD ..
the concept was to give a pulse to each 2-diagonal SCR in the H-Bridge .
the problem was for some 'Firing angle " , the motor goes to be Unstable 8-O 8-O !
why would the motor go in Instability region .. WHAT IS THE SOLUTION FOR THAT PROBLEM ?!
the concept was to give a pulse to each 2-diagonal SCR in the H-Bridge .
the problem was for some 'Firing angle " , the motor goes to be Unstable 8-O 8-O !
why would the motor go in Instability region .. WHAT IS THE SOLUTION FOR THAT PROBLEM ?!