oday_albadarneh
Newbie level 6
Hi all
I have a project connecting pic16f878a to the pc
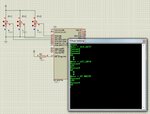
i programmed it using mikroc. When testing serial communication virtually i recieved the data correctly. But when I test my hardware i recive rubbish letters on hyperterminal.
May anyone help me with that problem ?!!
I should submit my project after 18 hours, i stucked here !!
I have a project connecting pic16f878a to the pc
i programmed it using mikroc. When testing serial communication virtually i recieved the data correctly. But when I test my hardware i recive rubbish letters on hyperterminal.
May anyone help me with that problem ?!!
I should submit my project after 18 hours, i stucked here !!