McCool89
Newbie level 5
Hi guys, first post today.
im currently doing my final year thesis and im making a rotating solar mirror.
i need some help with a PIC program that will control a servo motor.
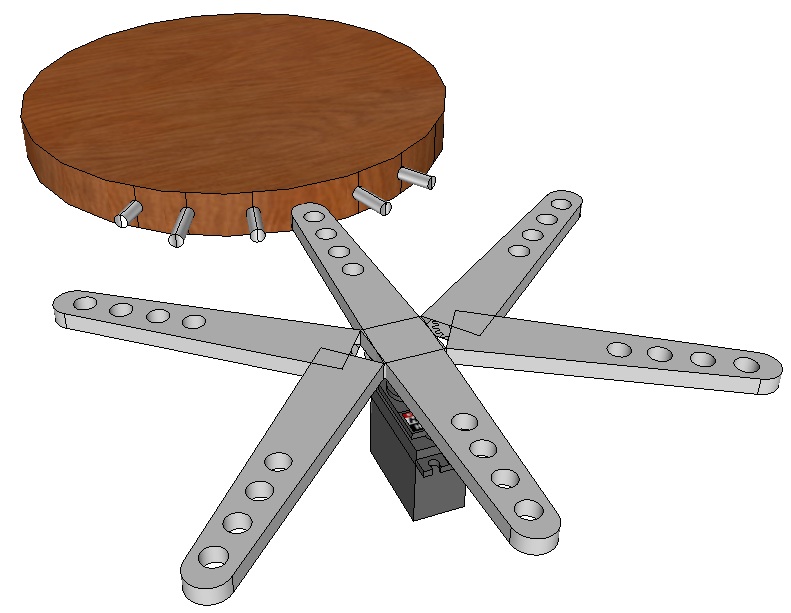
the servo motor will have a rotating arm at the end which can rotate through 360 degrees, it has 6 arms on it so each arm is 60 degrees apart.
what i need is a program for the PIC that will make the servo motor rotate one arm or 60 degrees every 11.5 mins
any help on this guys would be brilliant :smile:
many thanks in advance
Conal
im currently doing my final year thesis and im making a rotating solar mirror.
i need some help with a PIC program that will control a servo motor.
the servo motor will have a rotating arm at the end which can rotate through 360 degrees, it has 6 arms on it so each arm is 60 degrees apart.
what i need is a program for the PIC that will make the servo motor rotate one arm or 60 degrees every 11.5 mins
any help on this guys would be brilliant :smile:
many thanks in advance
Conal