almasee
Junior Member level 1
i want it in C++,please
hi,
good evening
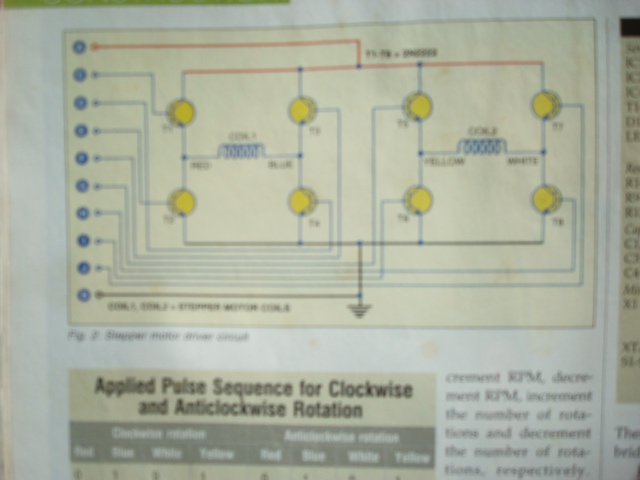
i have a project about stepper motor controlled by micro controller (89c51)
till know , we couldn't burn the programs because the language of program is assembly language(as they told us),so we you want you to give us an program with C++ or machine language
our machine should run at
1- run clock wise
2-run anticlockwise
3-increase /decrease RPM
4-increase /decrease revolutions
5-stop motor
6-change the mode
i hope you help us
my regards
info about contoller AT89C51.
hi,
good evening
i have a project about stepper motor controlled by micro controller (89c51)
till know , we couldn't burn the programs because the language of program is assembly language(as they told us),so we you want you to give us an program with C++ or machine language
our machine should run at
1- run clock wise
2-run anticlockwise
3-increase /decrease RPM
4-increase /decrease revolutions
5-stop motor
6-change the mode
i hope you help us
my regards
info about contoller AT89C51.