Justinli
Member level 4
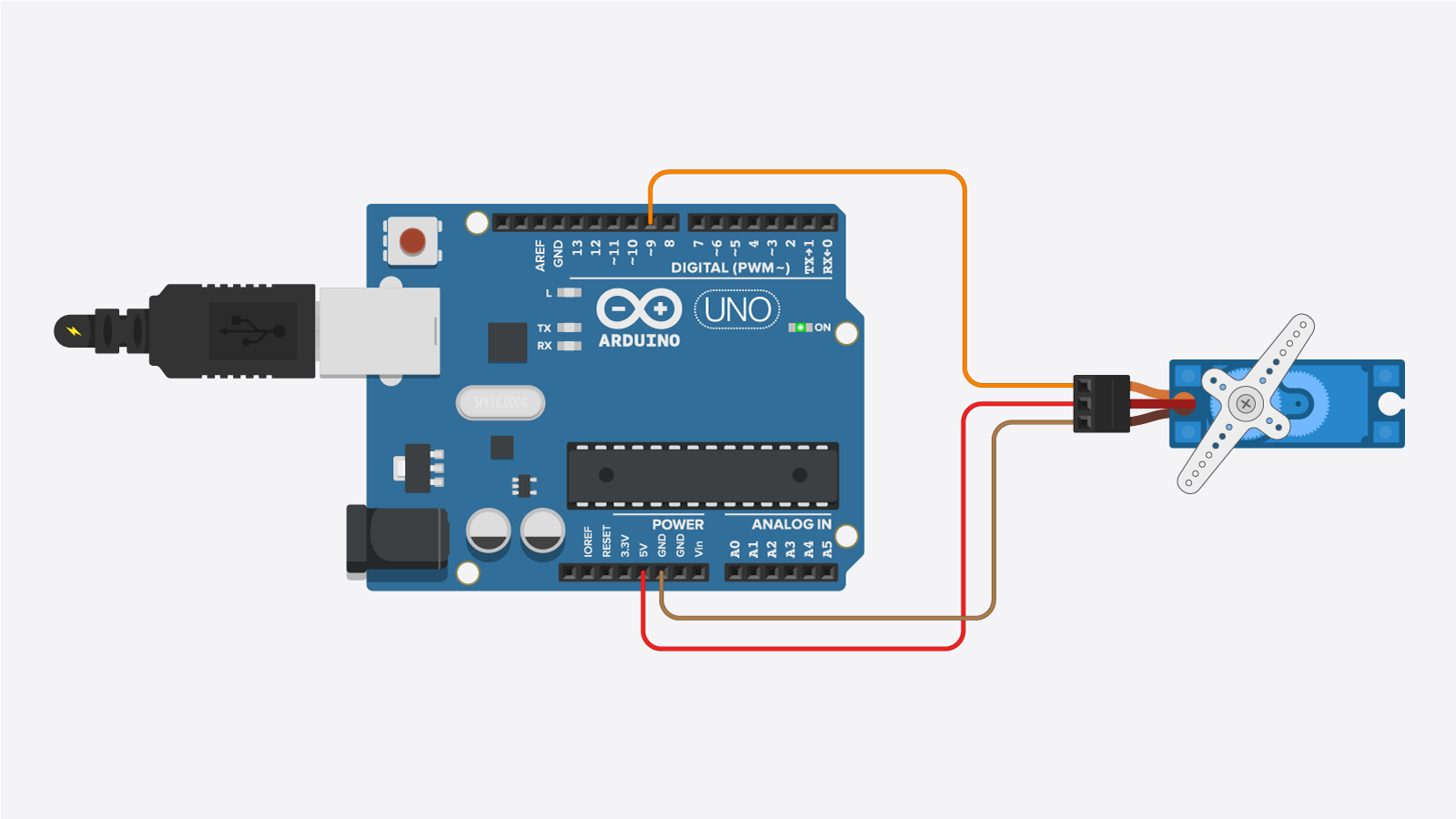
I bought an Arduino controller online and bought several bus servos to make a quadruped robot. I want to use Arduino to control the servo variable speed movement and can show it on the LCD display in real-time.
I found that the control program given by the store can only realize the uniform motion of the servo mode, and I would like to ask how to program the algorithm to realize the variable speed motion of the servo bionic.
I found that the control program given by the store can only realize the uniform motion of the servo mode, and I would like to ask how to program the algorithm to realize the variable speed motion of the servo bionic.