mohamed.elsabagh
Full Member level 2
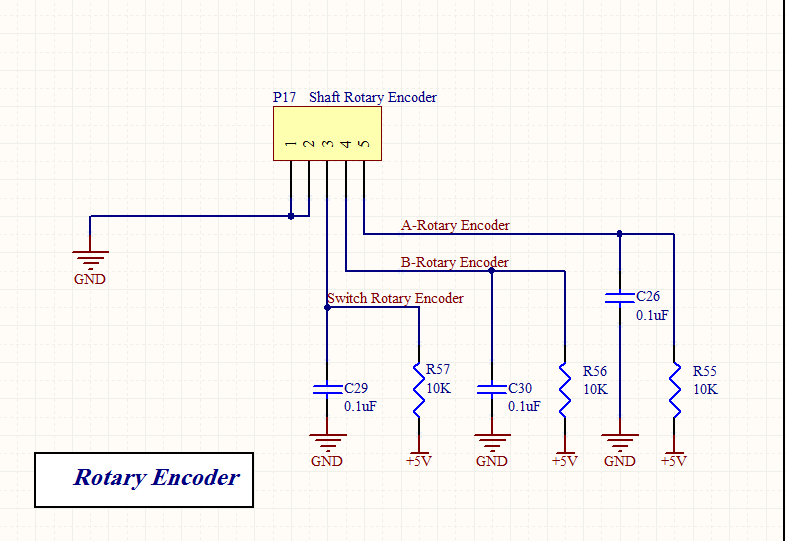
I am using a rotary encoder with a switch button, I am using c8051f340 microcontroller to detect the encoder movement on external interrupt, but the problem is that sometimes the code detect the clock wise movement as anticlock wise and vice versa i don't know what is the wrong, is there a problem with the rotary encoder itself.