mehran123
Member level 1
hi
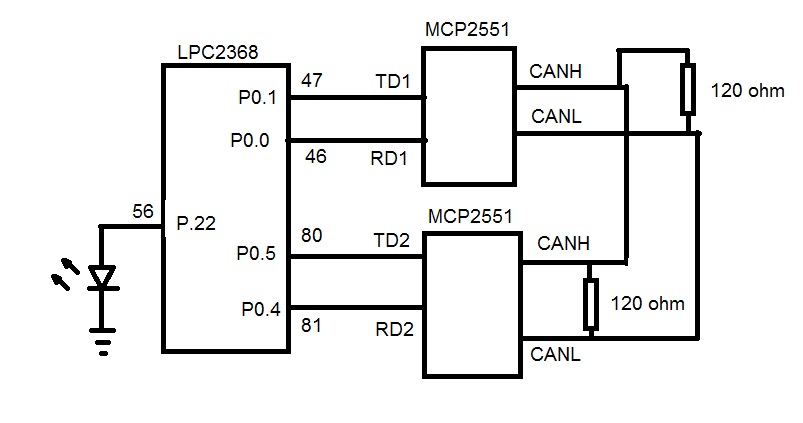
I want make a CAN bus between P0.0,P0.1 and P0.4,P0.5 of LPC2368
I used MCP2551 for physical layer.
Data form TX1 is send,but it doesn't receive to RX2.
TX of micro is connected to pin1 of MCP2551 and RX is connected to pin4.
I used 2 MCP2551,and CANL and CNHH of those are connected together.
I used example of keil for test , then program didn't have any problem.
do you have any idea for test physical layer?
I want make a CAN bus between P0.0,P0.1 and P0.4,P0.5 of LPC2368
I used MCP2551 for physical layer.
Data form TX1 is send,but it doesn't receive to RX2.
TX of micro is connected to pin1 of MCP2551 and RX is connected to pin4.
I used 2 MCP2551,and CANL and CNHH of those are connected together.
I used example of keil for test , then program didn't have any problem.
do you have any idea for test physical layer?