Brejain
Newbie level 3
- Joined
- Jan 5, 2010
- Messages
- 4
- Helped
- 0
- Reputation
- 0
- Reaction score
- 0
- Trophy points
- 1,281
- Location
- Coimbatore
- Activity points
- 1,322
Hi ...
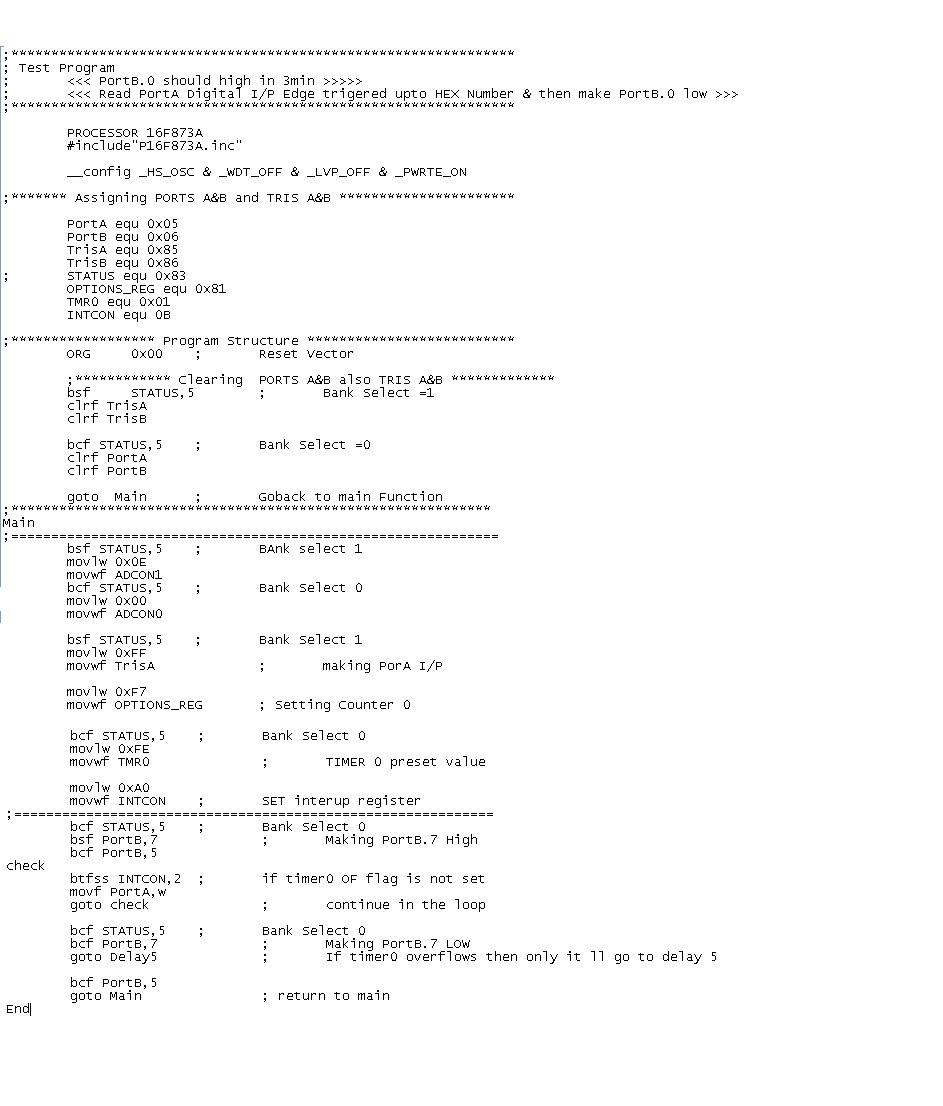
I am new to Pic . I have to implement a code which has to make Port B.0 pin high on after every 3min.But the Port B.0 should be turned off by checking the 10 edge triggering in the Port A.4 pin. So i tried to implement counter 0.Time delay of 3min is working fine for me. But the edge triggering I/P at Port A.4 is not affecting the counter.Its not causing an interrupt at INCON register.I am giving the code below with delay of 3min omitted.

Delay subroutine is omitted as its working fine for me.
Thanking all who tries to help
I am new to Pic . I have to implement a code which has to make Port B.0 pin high on after every 3min.But the Port B.0 should be turned off by checking the 10 edge triggering in the Port A.4 pin. So i tried to implement counter 0.Time delay of 3min is working fine for me. But the edge triggering I/P at Port A.4 is not affecting the counter.Its not causing an interrupt at INCON register.I am giving the code below with delay of 3min omitted.
Delay subroutine is omitted as its working fine for me.
Thanking all who tries to help