WaveTheory
Newbie level 5
I'm building a 2000W sensored brushless DC motor driver. I'm using IR2110 drivers with FDP2532 FETs. The drivers are fed 6 synchronized PWM signals at 72khz. High-side signals have dead-time controlled by the microcontroller. High-side FETs repeatedly fail despite the protections I have implemented. Ive been stuck on this for a week, and it's time to turn to the community for help.
THE SETUP:
An adjustable CC/CV lab power supply feeds juice to the prototype controller. FETs in the controller are mounted to a ridiculously over-sized heatsink. The controller activates the motors winding sequentially with an 80% duty cycle. The motor is under no external load, and draws about .
THE FAILURE:
The motor speeds up as I turn the voltage up on the power supply, and failure typically occurs around 25 volts. Sometimes the motor starts cogging a second before failure, sometimes there is no warning at all, and the motor jolts to a stops, and the power supply goes into current limiting mode.
DIAGNOSTICS:
Each time the failure has occurred, my DMM invariably shows one of the high-side FETs has failed short, and Gate-Drain resistance is a couple ohms. All 5 other FETs are fine, as are the drivers. Each high side FET has failed at least twice so far. Each time a failure occurs, the motor is drawing less than 2A, and the FETs are cool to the touch.
At first, I figured voltage spikes caused by the motor winding were killing the FETs, so I added high-speed diodes in reverse across each FET to clamp the winding voltage. Failure still occurred. Next I figured ringing/noise in the supply rail was killing the FETs. I added polypropylene and electrolytic capacitors, which made the rail voltage very clean. Still no change. Next, I guessed induced voltage spikes, or ringing in the MOSFET gates must be the problem. The gates are rated for +/- 20V, so I added 15v TVS diodes on all 6 gates. Again, no change. Next, I guessed ringing between the motor winding wires was the problem. I added an RC snubber, and 30V TVS diodes between the windings, and still I cannot crank the supply past 25v without getting a failure within a few seconds.
SO LIKE, WTF?
WIth FETs cool to the touch, and a current-limited supply, They cannot be frying from overheat, or overcurrent. WIth TVS diodes on the gates, there cannot be overvoltage on them, and with high-speed diodes clamping the motor terminal, there can be no overvoltage there either. My O-Scope shows clean gate-drive signals with minimal ringing, clean rail voltage, and a slight ringing on the motor terminal in the 1.2mhz range (though this could be internal to the scope lead), but otherwise fine output signal. With my understanding, I see no theoretical way the FETs could fail. I can guess the fact that only high-side FETs fail must have something to do with the problem. I have also read something about "Dv/Dt failure" but don't know what characterizes it.
Thanks for any input!
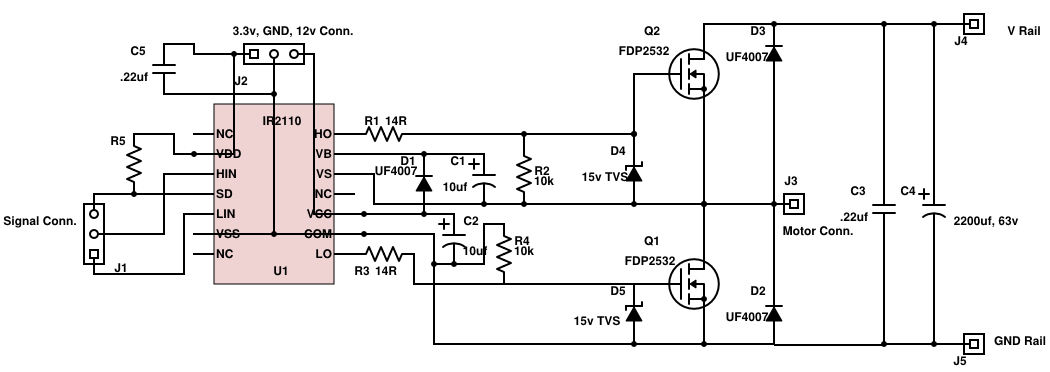
The schematic shows one of the three identical bridges and FET drivers that make up the device. Sorry if it's a bit messy. I have not used this schematic software before.
THE SETUP:
An adjustable CC/CV lab power supply feeds juice to the prototype controller. FETs in the controller are mounted to a ridiculously over-sized heatsink. The controller activates the motors winding sequentially with an 80% duty cycle. The motor is under no external load, and draws about .
THE FAILURE:
The motor speeds up as I turn the voltage up on the power supply, and failure typically occurs around 25 volts. Sometimes the motor starts cogging a second before failure, sometimes there is no warning at all, and the motor jolts to a stops, and the power supply goes into current limiting mode.
DIAGNOSTICS:
Each time the failure has occurred, my DMM invariably shows one of the high-side FETs has failed short, and Gate-Drain resistance is a couple ohms. All 5 other FETs are fine, as are the drivers. Each high side FET has failed at least twice so far. Each time a failure occurs, the motor is drawing less than 2A, and the FETs are cool to the touch.
At first, I figured voltage spikes caused by the motor winding were killing the FETs, so I added high-speed diodes in reverse across each FET to clamp the winding voltage. Failure still occurred. Next I figured ringing/noise in the supply rail was killing the FETs. I added polypropylene and electrolytic capacitors, which made the rail voltage very clean. Still no change. Next, I guessed induced voltage spikes, or ringing in the MOSFET gates must be the problem. The gates are rated for +/- 20V, so I added 15v TVS diodes on all 6 gates. Again, no change. Next, I guessed ringing between the motor winding wires was the problem. I added an RC snubber, and 30V TVS diodes between the windings, and still I cannot crank the supply past 25v without getting a failure within a few seconds.
SO LIKE, WTF?
WIth FETs cool to the touch, and a current-limited supply, They cannot be frying from overheat, or overcurrent. WIth TVS diodes on the gates, there cannot be overvoltage on them, and with high-speed diodes clamping the motor terminal, there can be no overvoltage there either. My O-Scope shows clean gate-drive signals with minimal ringing, clean rail voltage, and a slight ringing on the motor terminal in the 1.2mhz range (though this could be internal to the scope lead), but otherwise fine output signal. With my understanding, I see no theoretical way the FETs could fail. I can guess the fact that only high-side FETs fail must have something to do with the problem. I have also read something about "Dv/Dt failure" but don't know what characterizes it.
Thanks for any input!
The schematic shows one of the three identical bridges and FET drivers that make up the device. Sorry if it's a bit messy. I have not used this schematic software before.