Don_dody
Full Member level 1
Re: Need Help: AVR - L293D - Bipolar stepper motor
Hi, thank you,
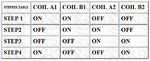
I use this table:

to build the following code:
I connect the control pins to PORTB.3,4,5,6
Well is that right?
Hi, thank you,
I use this table:
to build the following code:
Code:
void main(void)
{
PORTB=0x07;
DDRB=0xFF;
while (1)
{
PORTB=0b00101000;
delay_ms(100);
PORTB=0b00110000;
delay_ms(100);
PORTB=0b01010000;
delay_ms(100);
PORTB=0b01001000;
delay_ms(100);
}
}I connect the control pins to PORTB.3,4,5,6
Well is that right?
")