Vermes
Advanced Member level 4
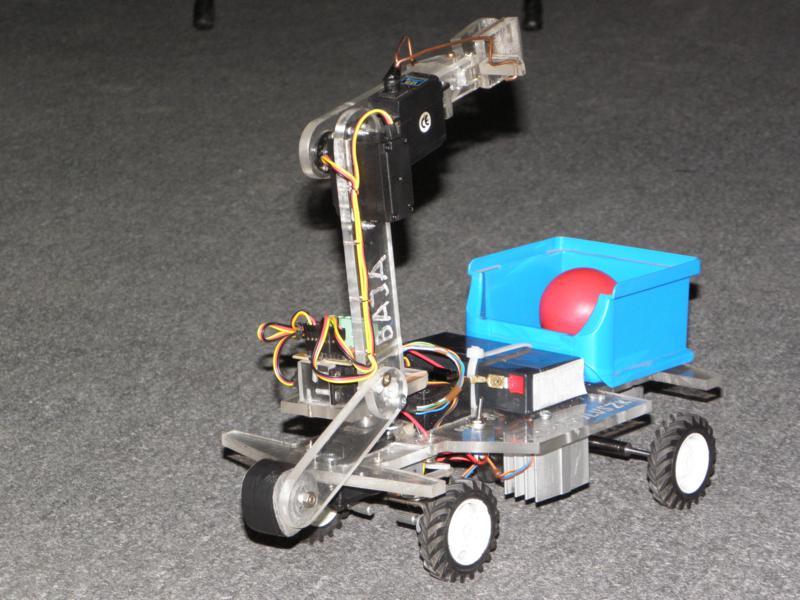
The assumptions were to create a prototype mobile robot on the structure of the joint, whose job was to transport small objects. The robot was to be controlled wirelessly via IR signals from the remote control.
The manipulator consists of five servomechanisms, which drive three degrees of freedom of the device. Three servomechanisms are responsible for the movement of kinematic arm of the robot, and the remaining two servomechanisms are responsible for the drive of effector and the steering system. A small DC motor controlled by a microprocessor and a bridge H correspond to the mobile platform drive.
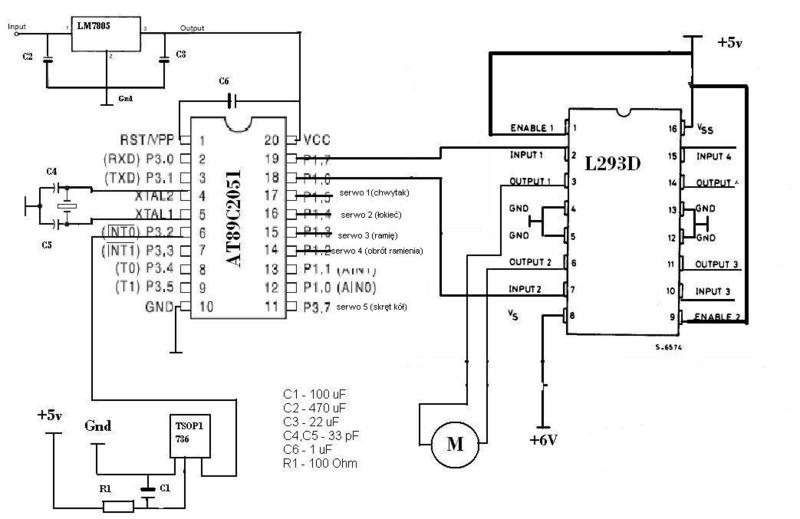
The control is made by wireless remote control. The robot has its own power source, which allows it to freely move around the area. The whole is controlled from processor Atmel at89c2051. Everything is controlled directly using rc5 remote control and the assembly of the accumulator in the device allow for complete freedom of driving the robot. The robot base was made of plexiglass and other parts.
Gallery:




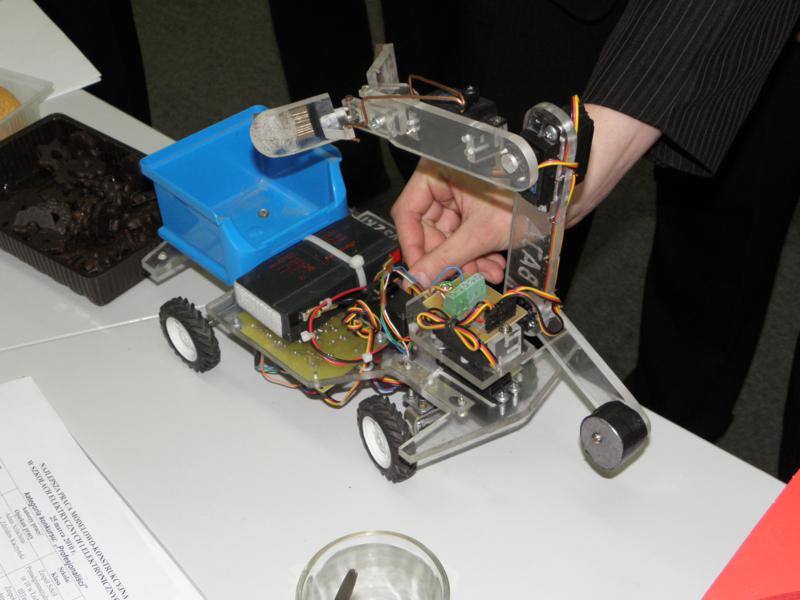
Link to original thread (useful attachment) – Manipulator mobilny "BAJA"