Vermes
Advanced Member level 4
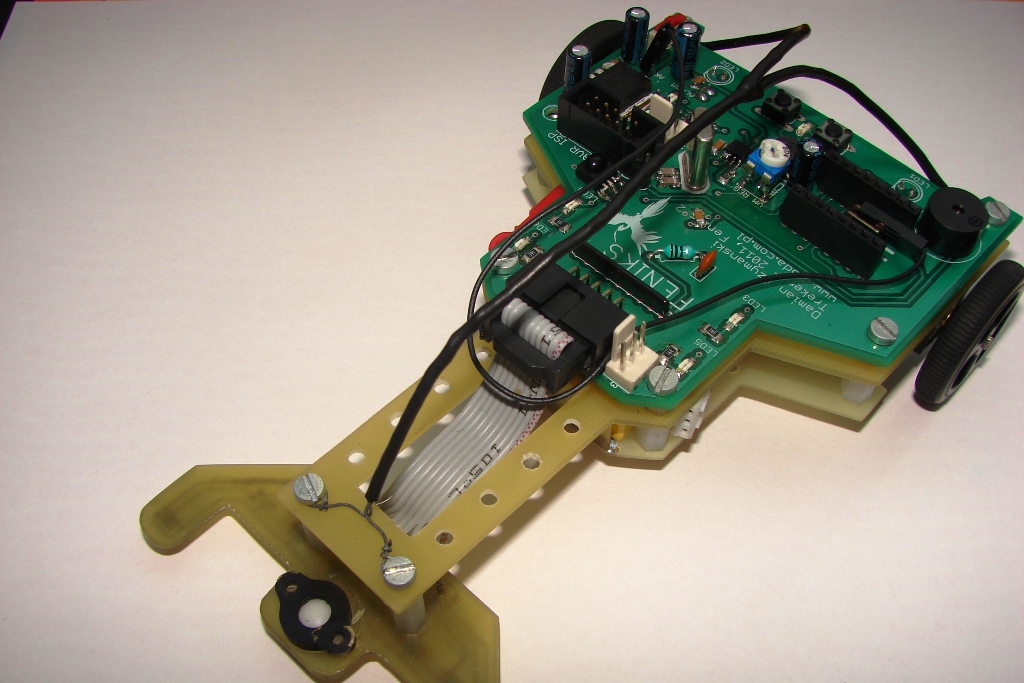
Mechanics and drive
The whole mechanics is based on laminate and a lot of spacers. The drive are Pololu 30:1 HP motors and wheels 32mm.
Electronics
Two plates are responsible for work of the whole device. One of them is with the processor and the second one with the sensors. Main plate has Atmega16 processor, a connector for sensors, programmer and RS232, additional connectors, e.g. for analogue Sharp. The whole construction is powered from Li-po 2S package, electronics gets 5V through the LDO stabilizer, and the motors are powered by ST1S10PHR inverter. It worked very well, but finally it burned. There must be an error in the schema, so it should not be copied precisely. The best idea is to be inspired by a catalog note. The drivers are controlled by a module from TB6612FNG LINK.
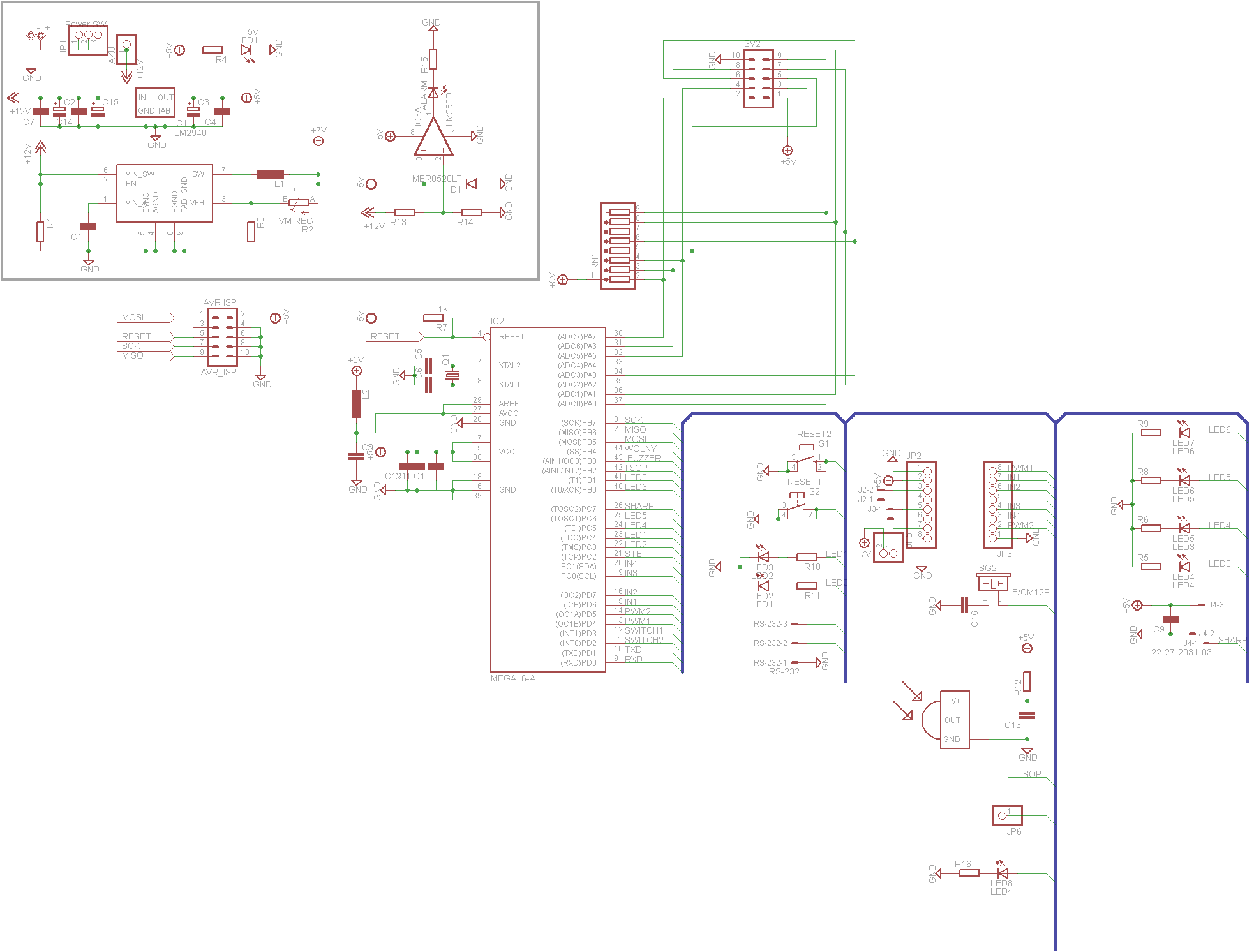
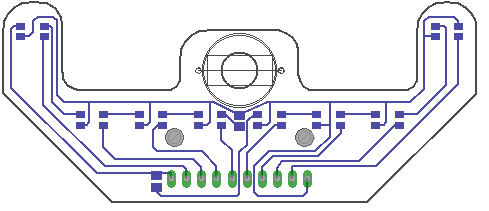
Schema of the board with uC.
Boards were made in Satland Prototype.
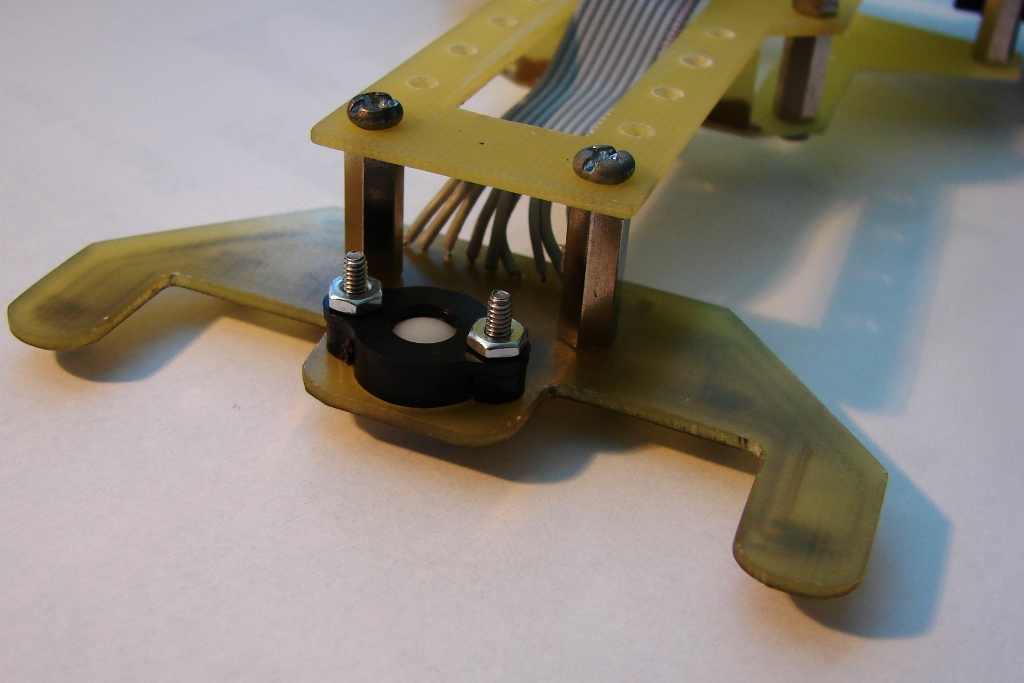
The board with the sensors, 8 pieces. KTIR0711S and ballcaster from Pololu.
Program
The whole program was written in BASCOM. The robot is controlled by PID, in fact the same PD was used more often.
It is a video of initial tests:
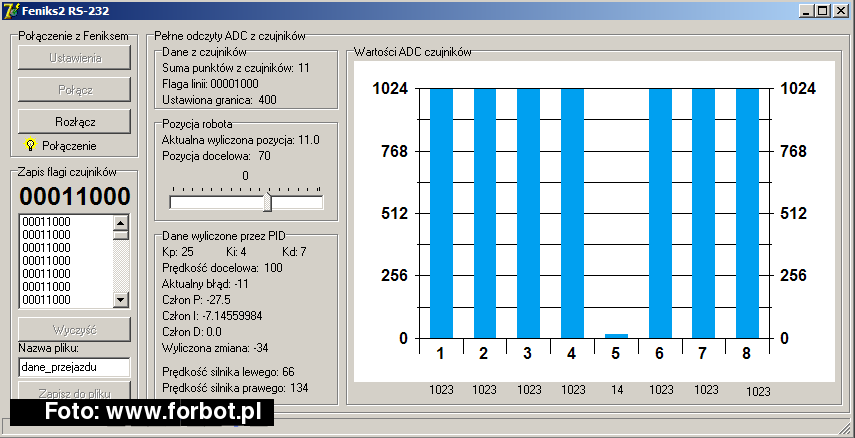
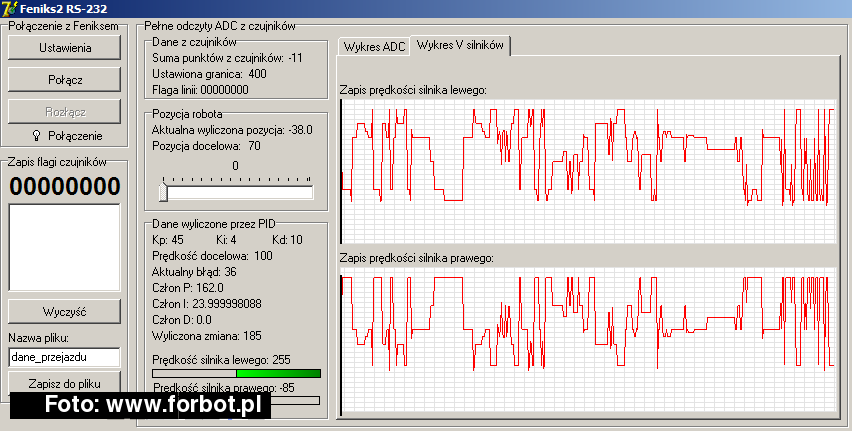
At the end, a program written in Delphi was made to the whole structure, which transmitted various data by an additional module to the PC:
Link to original thread – Robot typu LineFollower - Feniks2