gdylp2004
Member level 5
Hi,
I am currently using the C8051F120 development kit (see attached) in attempt to sense the o/p voltage from my Buck convertor and adjust the PWM signal, which is also generated from the 8051 chip.
However my question is how should I connect point A (see another attachment) and interface it with the development kit?
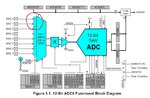
I've read somewhere from the datasheet that there is an internal reference voltage of 1.2V and therefore I've stepped down the 28V output with a set of appropriate resistors (R1 & R2).
Assuming I would like to make about 30 samples before I made one adjustment to the PWM duty cycle, would what I've drawn in the attached been feasible?
Also, I got a hunch that I might as well omit the comparator and DAC, that is, connecting the register output directly to the processor.
Any comments would be appreciated.
Thanks in advance.
- Michael
I am currently using the C8051F120 development kit (see attached) in attempt to sense the o/p voltage from my Buck convertor and adjust the PWM signal, which is also generated from the 8051 chip.
However my question is how should I connect point A (see another attachment) and interface it with the development kit?
I've read somewhere from the datasheet that there is an internal reference voltage of 1.2V and therefore I've stepped down the 28V output with a set of appropriate resistors (R1 & R2).
Assuming I would like to make about 30 samples before I made one adjustment to the PWM duty cycle, would what I've drawn in the attached been feasible?
Also, I got a hunch that I might as well omit the comparator and DAC, that is, connecting the register output directly to the processor.
Any comments would be appreciated.
Thanks in advance.
- Michael