mayasunny
Member level 3
Hello all,
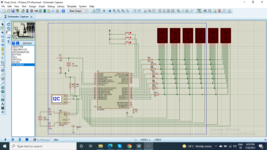
I am currently working with developing Digital clock. I'm using PIC18F4550, DS1307 RTC, 6 seven segment display for displaying clock in HH.MM.SS format.
While reading the clock, I'm getting approximately 10 sec of delay for each second. I don't know where I'm going wrong. Below are my specifications
1. pic18f4550 micro controller
2. Ds1307 RTC with 32.76KHz, 3v battery
3. 1-digit Common cathode 7-segment displays ( using multiplexing concept)
If I mention about 500ms delay after every read, it shows the proper time but 7-Segment display is flickering continuously.
I testing the code with proteus software.
I am currently working with developing Digital clock. I'm using PIC18F4550, DS1307 RTC, 6 seven segment display for displaying clock in HH.MM.SS format.
While reading the clock, I'm getting approximately 10 sec of delay for each second. I don't know where I'm going wrong. Below are my specifications
1. pic18f4550 micro controller
2. Ds1307 RTC with 32.76KHz, 3v battery
3. 1-digit Common cathode 7-segment displays ( using multiplexing concept)
If I mention about 500ms delay after every read, it shows the proper time but 7-Segment display is flickering continuously.
I testing the code with proteus software.