Shanmukesh
Newbie level 6
Brief Introduction of the project:
Three phase induction motor overload protection relay using a microcontroller based circuit.
Parameters being Monitored by Microcontroller:
Three phase current consumed by the motor.
Parameters known:
Motor's rated current
Service factor
Locked rotor current of motor
Locked rotor withstand time.
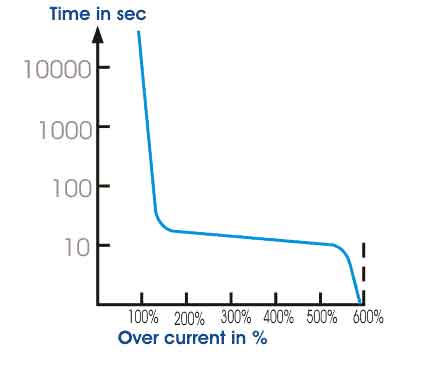
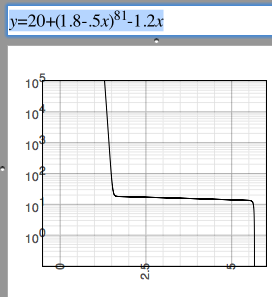
How do I set the Overload curve or response curve of the relay? (Current v/s time)
The probable solution can be, by implementing a lookup table.
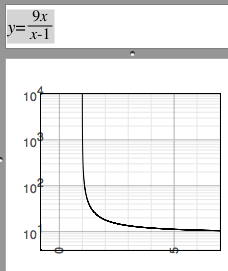
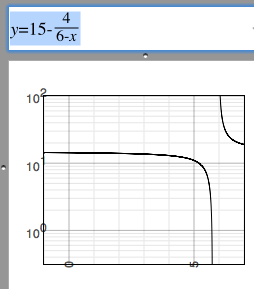
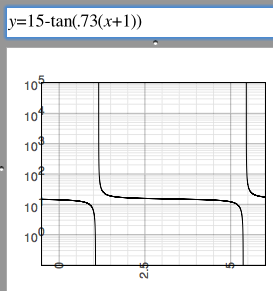
but what would be the Equation of the curve so that it can be calculated in run-time.
Three phase induction motor overload protection relay using a microcontroller based circuit.
Parameters being Monitored by Microcontroller:
Three phase current consumed by the motor.
Parameters known:
Motor's rated current
Service factor
Locked rotor current of motor
Locked rotor withstand time.
How do I set the Overload curve or response curve of the relay? (Current v/s time)
The probable solution can be, by implementing a lookup table.
but what would be the Equation of the curve so that it can be calculated in run-time.